![]() ISSN 0798 1015
ISSN 0798 1015

![]() ISSN 0798 1015
ISSN 0798 1015
Vol. 38 (Nº 57) Año 2017. Pág. 5
José David BOTERO IZÁCIGA 1; César Augusto PEÑA CORTÉS 2; Sonia Carolina MANTILLA TOLOZA 3
Recibido: 16/07/2017 • Aprobado: 12/08/2017
4. Conclusiones y trabajos futuros
RESUMEN: Se presenta el desarrollo de dos robots animatrónicos como instrumento lúdico para capturar la posición tridimensional de las extremidades de niños y realizar terapias que los motiven. Los datos se obtuvieron a través de una cámara de profundidad de bajo costo. Se estiman los ángulos requeridos para el análisis biomecánico. Se ilustra la integración de los dispositivos electromecánicos. Se presentan los resultados experimentales correspondientes a niños sanos, quienes realizaron movimientos de abducción de hombro y cadera, evidenciando el correcto funcionamiento del sistema. |
ABSTRACT: The development of two animatronic robots is presented as a playful tool to capture the three-dimensional position of the limbs of children and to carry out therapies that motivate them. Data were obtained through a low cost depth camera. The angles required for the biomechanical analysis are estimated. The integration of electromechanical devices is illustrated. The corresponding experimental results to healthy children who performed movements of shoulder and hip abduction, demonstrating the proper functioning of the system are presented. |

El compromiso y la motivación del paciente son elementos cruciales para lograr buenos resultados en los tratamientos de rehabilitación o en la ejercitación. Se sabe que la mente juega un papel transcendental cuando las personas están realizando un tratamiento o incluso cuando personas sanas realizan un ejercicio en particular. Un ejemplo muy común se puede considerar en el rendimiento de los futbolistas durante un encuentro deportivo de acuerdo al marcador que llevan. El primer equipo que realiza la anotación por lo general se motiva y continua dando buenos resultados, por el contrario, en los casos que la diferencia del marcador aumenta, el equipo perdedor cada vez se desmotiva más y comete un mayor número de errores o faltas. Estos aspectos motivacionales pueden ser aprovechados de forma positiva en los temas de rehabilitación, sobre todo en casos particulares de los niños, dado que ellos cuentan con una gran imaginación y se motivan bastante por medio de las actividades lúdicas o los juegos. Este tipo actividades pueden enmascarar algunas molestias y los motivan a realizar ejercicios haciéndoles cambiar el concepto de ir a una terapia, por ir jugar.
Aspectos como la satisfacción, la motivación, la perseverancia y disciplina son claves para garantizar la participación del paciente y lograr un tratamiento exitoso (Mendonça & Guerra, 2007). Desafortunadamente, los altos niveles de motivación y adherencia a menudo están ausentes durante los programas de ejercicio terapéutico, posiblemente debido a la naturaleza repetitiva de los ejercicios (Sluijs et. al., 1993).
Diversos estudios han encontrado que las intervenciones fisioterapéuticas basadas en la realidad virtual favorecen la ejecución de tareas potencialmente monótonas y repetitivas (Brian et. al., 2012) facilitan la motivación de los pacientes para participar del proceso de rehabilitación (Tatla et. al., 2014; Fitzgerald et. al., 2010) incrementando los niveles de satisfacción (Jannink et. al., 2008), e incluso ha sido usada para distraer a las personas del dolor agudo o crónico (Das et. al., 2005).
El uso de juegos de realidad virtual que incorporan ejercicios puede ser una solución potencial para mejorar la continuidad a los programas de ejercicio clínico prescrito (Yong et. al., 2010). Los sistemas de rehabilitación virtual recientemente se han descrito como una "combinación de computadores, interfaces especiales y ejercicios de simulación utilizados para entrenar a los pacientes de una manera atractiva y motivadora" (Burdea et. al., 2007). Estas nuevas herramientas podrían incorporar al proceso de rehabilitación un entorno donde el paciente sea capaz de interactuar con una aplicación, a través de la ejecución de movimientos (Taylor et. al., 2011; Hillman, 2004; Raymond, 2011). Basándose en este aspecto, este artículo presenta el avance en el desarrollo de dos robots animatrónico, uno tipo mariposa y el otro pez, que incorporan un ambiente lúdico para apoyar la terapia física en miembros superiores e inferiores, específicamente para incrementar los movimientos de abducción de hombro y de cadera respectivamente.
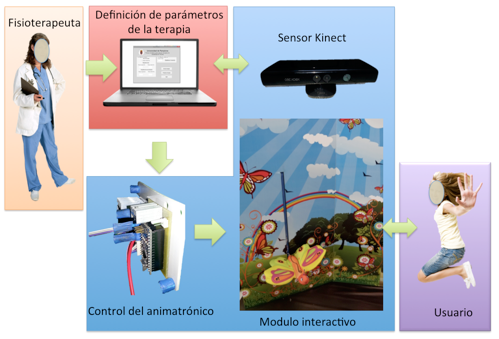
Este trabajo presenta un sistema de apoyo para rehabilitación. El método desarrollado se compone de cuatro módulos: a) el módulo de configuración donde el terapeuta programa el avance del juego de acuerdo a los requerimientos físicos del usuario, es decir el profesional configura la amplitud del movimiento y las repeticiones que realizará el paciente b) módulo de seguimiento del esqueleto que reconoce el cuerpo del paciente y extrae datos de las articulaciones c) módulo de análisis biomecánico que es responsable para el análisis de los movimientos de los pacientes desde la perspectiva de los parámetros biomecánicos basados en planos y ángulos; d) módulo interactivo o de juego, que consiste en un juego que controla los animatrónicos tipo mariposa y pez, a partir de la secuencia terapéutica de movimientos y repeticiones.
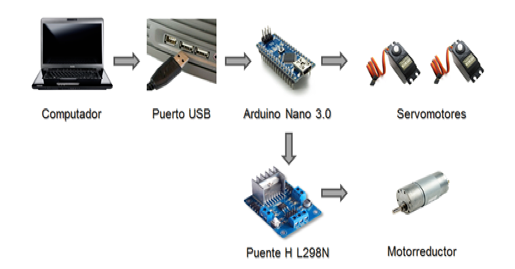
En la Figura. 1, se muestra la arquitectura del sistema mecatrónico. En este diagrama, se aprecia la idea general del funcionamiento. En primer lugar el fisioterapeuta describe los parámetros de la terapia deseada de acuerdo a las características del usuario. El módulo interactivo genera una historia la cual es transmitida al usuario (el niño) de forma sonora, a su vez el sistema reconoce la postura del usuario y los movimientos del mismo de tal forma que se produce una interacción. Por ejemplo si el usuario deja de hacer un movimiento, la mariposa o el pez animatrónicos intentan persuadirlo para que lo haga o si el movimiento se hace de forma incorrecta se le anima hasta que lo consiga. La historia trata de una mariposa que quiere aprender a volar y un pez que quiere nadar más rápido; los niños al realizar algunos movimientos le indican como hacerlo. A medida que los niños realizan los movimientos (terapia) la mariposa los va imitando, al terminar la mariposa lograr volar y en el caso del pez logra su acometido.
Figura 1
Arquitectura metodológica del sistema mecatrónico
En este módulo el fisioterapeuta especifica los parámetros de avance del juego de acuerdo a la capacidad de amplitud de movimiento referida por el paciente y la que se pretende incrementar, es decir, el profesional configura la amplitud de los movimientos y las repeticiones que llevará a cabo el paciente. Una vez realizada la configuración, los animatrónicos actúan de acuerdo a los ángulos articulares del usuario cuando realice la abducción de hombro o de cadera.
En general, la terapia física interviene diversidad de deficiencias motoras, a partir de técnicas terapéuticas que incluyen el movimiento principalmente (Serra et. al., 2003). Por lo tanto, los dispositivos que se proponen en el presente artículo requirieron de la adaptación de un sistema que permitiera realizar un seguimiento de los movimientos naturales de los pacientes sin el uso de marcadores o controladores.
Para extraer los datos de las articulaciones y así garantizar el seguimiento de cuerpo completo, se utilizó el sensor Kinect de la empresa Microsoft. El sensor consta de una cámara RGB, lo que permite una asociación de imágenes en color de dos dimensiones con su respectiva información de profundidad (Muñoz et. al., 2013). Con esto se logra una percepción tridimensional con el origen del eje Z centrado en el dispositivo. La cámara del Kinect proporciona una imagen de 640x480 en color a 30 fotogramas por segundo con una resolución de profundidad de unos pocos centímetros (Shotton et. al., 2011).
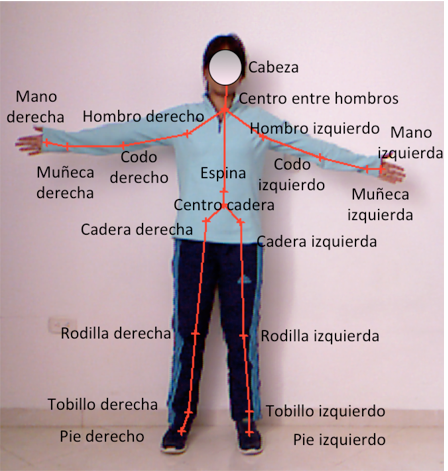
Con el sensor Kinect se obtuvieron los datos para representar el esqueleto del usuario. Estos datos se procesan con el fin de facilitar el análisis biomecánico. Este sensor proporciona las coordenadas 3D en espacio euclidiano de las articulaciones del esqueleto. A partir de dos articulaciones sucesivas se puede representar los huesos de los segmentos corporales, por ejemplo, el segmento que une la articulación del hombro y la articulación del codo permiten representar el segmento del hueso del brazo. Por otra parte el segmento que une la articulación de la cadera (derecha o izquierda) con la correspondiente rodilla define el Fémur.
El sensor permite el seguimiento efectivo de hasta 20 articulaciones (López et. al., 2013) distribuidas alrededor del cuerpo. En la Figura 2 se ilustra una superposición de la imagen obtenida con la cámara RGB del sensor y la reconstrucción del esqueleto de un usuario.
Figura 2.
Diagrama tipo esqueleto con las articulaciones capturado a través del sensor Kinect
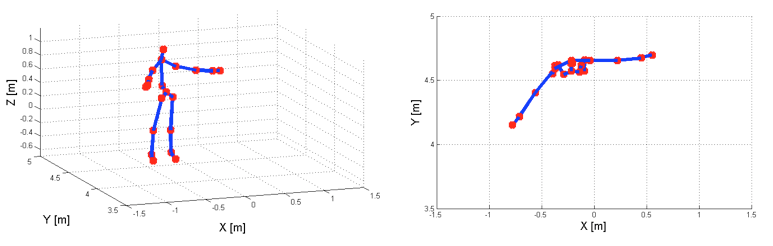
En la Figura 3(a) se puede apreciar la reconstrucción tridimensional del esqueleto. Como se puede observar este diagrama brinda mayor información debido a que permite estimar la posición en los tres ejes coordenados de los 20 puntos preestablecidos. Un ejemplo de las capacidades que brinda este sistema se puede apreciar en la Figura 3(b) que representa la vista superior del diagrama del esqueleto, donde se puede detectar claramente que el brazo derecho del usuario se encuentra flexionado hacia delante, aspecto que no se puede detectar con facilidad en una imagen bidimensional. Cabe aclarar que se puede especificar cual vista para analizar de forma idónea un movimiento en particular.
Figura 3
a) Reconstrucción del esqueleto tridimensional
b) Vista superior de la reconstrucción del esqueleto tridimensional
El movimiento corporal se describe de acuerdo con el plano y el eje en el que se realiza. Cada articulación humana tiene un arco de movimiento asociado que indica, de acuerdo con su biomecánica, el número de planos en el que es capaz de moverse. Un solo movimiento de una articulación en un plano se llama un movimiento biomecánico y su arco de movimiento asociado se llama amplitud de movimiento (ROM, Range of Motion). En el proceso de fisioterapia, los ROM son comúnmente utilizados tanto en la evaluación como en el tratamiento.
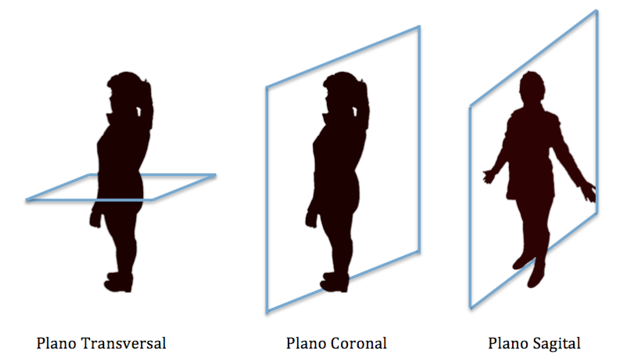
A partir de la posición anatómica (ver Figura 4) se superponen planos tridimensionales, en los que el movimiento biomecánico se puede ejecutar. El plano frontal o coronal (XY) es aquel que divide el cuerpo en anterior y posterior, el plano sagital o vertical (YZ) divide el cuerpo en los lados derecho e izquierdo, mientras en el plano horizontal o transversal (XZ), divide el cuerpo en arriba y abajo. Por consiguiente, en el plano sagital se llevan a cabo los movimientos de flexión y extensión, mientras que en el plano coronal tienen lugar los movimientos de abducción y aducción, por último en el plano transversal se llevan a cabo los movimientos de rotación interna y lateral (Bergmann & Peterson 2010).
Figura 4
Planos anatómicos del ser humano
Por lo general, la amplitud de movimiento se calcula con los ángulos originarios por el movimiento articular en cada plano (Jannink et. al., 2008). Para el desarrollo de este prototipo robótico se hizo énfasis en el movimiento del miembro superior específicamente en la abducción del hombro (Ver Figura 5). Utilizando el sistema de notación común (0 a 180°), la amplitud de movimiento para la abducción del hombro en condiciones normales inicia en una posición anatómica de 0° y progresa hasta 180° (Sullivan et. al., 2007).
Para este trabajo, el ángulo de este movimiento biomecánico, se obtuvo seleccionando las coordenadas del hombro y codo, luego se restan las coordenadas en Y de estas dos articulaciones (Ecuación 1).
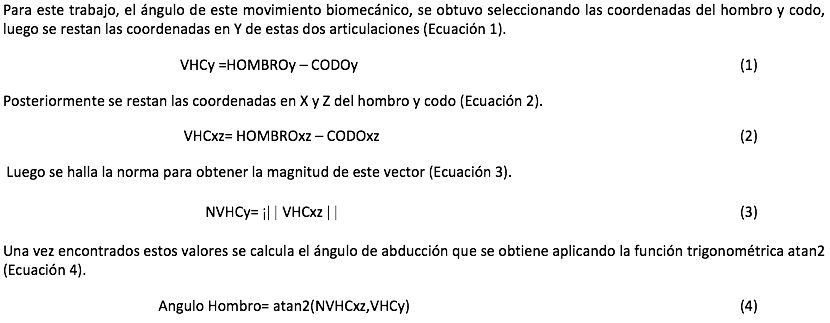
Figura 5
Ángulo de abducción de hombro (a) y de cadera (b)
Para el caso del cálculo del ángulo de abducción de cadera se seleccionan las coordenadas de cadera y rodilla, luego se restan las coordenadas en Y de estas dos articulaciones (Ecuación 5), posteriormente se restan las coordenadas en X y Z de la cadera y la rodilla (Ecuación 6) y se encuentra la norma para obtener la magnitud de este vector (Ecuación 7), una vez encontrados estos valores se calculan el ángulo de abducción que se obtiene aplicando la función atan2 (Ecuación 8).

La interacción del paciente se realiza a través de un juego, en el que debe atender comandos que emite el robot a través de sonidos, éste indica los pasos a seguir para dar continuación al mismo. Por su parte, el sistema de programación del módulo, responde a los movimientos efectuados por el paciente en el transcurso del juego. Al realizar correctamente los ejercicios y en el lugar indicado, el algoritmo procesa los datos de reconocimiento y activa los sonidos.
El desplazamiento de los animatrónicos se efectuará, siempre y cuando se lleven a cabo los movimientos correctos, ya que para ello, el fisioterapeuta (quien será el encargado de implementarlo), seleccionará los ángulos con los grados de amplitud necesarios para cada paciente, según su limitación en el ROM y de no alcanzarlos, el módulo responderá con estímulos a través de comandos, que estimule al paciente a ejecutar el movimiento de forma más amplia. Sin embargo, el profesional guiará y acompañará al usuario durante toda la terapia, monitoreando la ejecución adecuada del movimiento.
Tomando como punto de partida el movimiento de abducción de hombro o de cadera (según él animatrónico con el que desea jugar el usuario), el juego consiste en controlar el animatrónico tipo mariposa o el pez, repitiendo consecutivamente la abducción del hombro o de cadera respectivamente, en la amplitud de movimiento establecida por el fisioterapeuta durante la configuración. El juego está diseñado en dos partes, en la primera, el usuario realiza los movimientos de abducción en la amplitud definida por el fisioterapeuta y realiza las repeticiones que han sido establecidas con anterioridad. En caso de que el sujeto no levante el brazo (o la pierna para el caso del pez) o no alcance el arco que el fisioterapeuta estableció, el animatrónico lo alentará a levantar el brazo, emitiendo comandos motivantes como: ¡Animo, tu puedes!, ¡Vamos arriba!. Una vez el usuario haga las repeticiones completas, la mariposa moverá las alas y se desplazará de forma vertical por el módulo simulando volar. En el caso del pez a medida que el usuario mueva la pierna este se desplazará hacia delante hasta terminar el recorrido.
Para la segunda parte, la inclinación de las alas de la mariposa será en tiempo real y dependerá del ángulo articular del hombro del paciente, es decir, la mariposa moverá sus alas y tratará de imitar los movimientos de abducción del usuario. La principal característica de este juego, es que el movimiento que controla el animatrónico se gradúa de acuerdo a las limitaciones del paciente. De esta manera, la máxima movilidad del usuario corresponderá a la máxima inclinación de las alas de la mariposa. El caso del pez es análogo con el movimiento de la aleta.
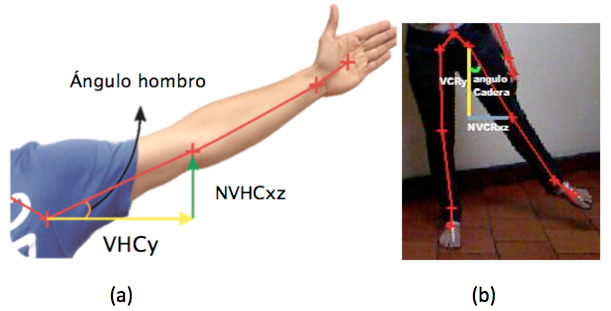
Figura 6
Diagrama de desarrollo de la terapia
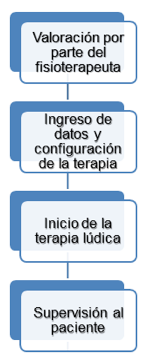
Los diseños de los animatrónicos fueron desarrollados en un software CAD, en el cual se realizó un ensamble virtual para hacer las correcciones y modificaciones que fueran necesarias hasta que arrojaran un resultado satisfactorio para su implementación. En la Figura 7 se pueden apreciar los resultados obtenidos.
Figura 7
Animatrónicos tipo mariposa y pez

Los animatrónicos están cubiertos de tela con rellenos de algodón en su interior, además poseen estructuras en acrílico que los proveen de la forma, y dos servomotores que le confieren el movimiento a las alas para el caso de la mariposa y un servomotor para mover la aleta del pez. Para elevarse la mariposa simulando el vuelo cuenta con una articulación prismática que imprime el movimiento vertical, para el caso del pez se utiliza una articulación prismática que conlleva al movimiento horizontal del mismo (ver Figura 8b).
Figura 8
Paneles frontal (a) y posterior (b) del modulo interactivo indicando
las articulaciones el sensor y el sistema de control
Para el diseño electrónico se utilizó la tarjeta de control Arduino Nano 3.0, debido a que este tipo de tarjetas usan software libre y son de bajo costo. La alimentación de todo el circuito se realiza con un adaptador AC/DC, que tiene una corriente de salida de 5.65 A y entrega un voltaje de 8.5 V. Este adaptador es útil para el correcto funcionamiento de los servomotores, debido a que estos consumen energía considerable. Se utiliza un regulador de voltaje de 5 V para alimentar los servomotores. Para el desplazamiento del animatrónico en el parque temático, se empleó un módulo puente H L298N, que es capaz de mover el motor con corriente de devanado de hasta 2.5 A. Este circuito permite controlar el motor por señales digitales sin ningún inconveniente, incluyendo puentes de diodos para la protección de los bobinados del motor.
Figura 9
Diagrama de conexión de los componentes
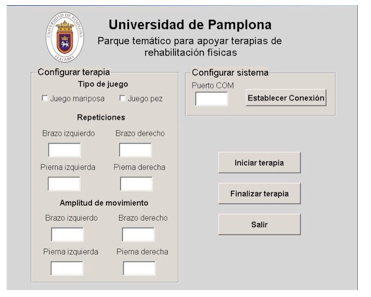
Se desarrolló una interfaz que permite al fisioterapeuta, programar el avance del juego de acuerdo a las capacidades y los requerimientos físicos del usuario. A través de esta interfaz, se configura el puerto COM que establece la comunicación con la tarjeta Arduino y el computador, también se pueden establecer las repeticiones y los grados de amplitud de movimiento que el profesional de la salud considere, de acuerdo a la valoración terapéutica. Una vez se configura el sistema se inicia la terapia donde el usuario comenzará el juego terapéutico.
Figura 10
Interfaz para configuración del juego
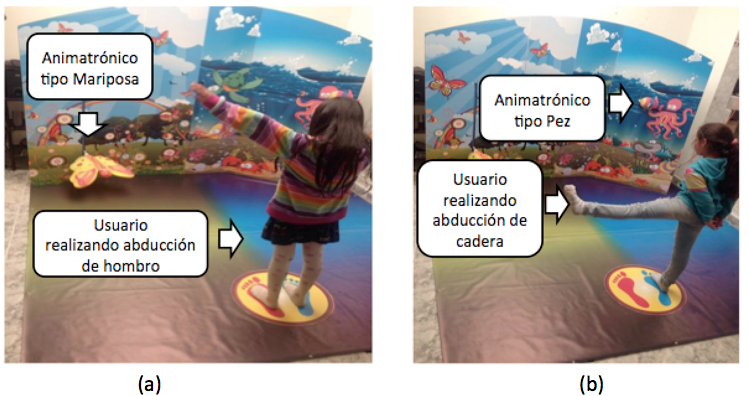
El juego se ensayó con 5 niños en edades comprendidas entre los 5 y 12 años (Tabla 1). El juego se programó para responder a una amplitud de movimiento máxima de 160° para hombro. Cabe resaltar que los menores que colaboraron en este estudio, no presentan anomalías físicas, ni se encuentran en procesos de rehabilitación (Figura 11).
Figura 11
Usuarios realizando los juegos terapéuticos. (a) Jugando con la mariposa, (b) con el pez
Los profesionales en fisioterapia hacen uso del goniómetro, para medir los ROM. Con la colaboración de una estudiante de fisioterapia de la Universidad de Pamplona, se realizaron medidas con un usuario de 9 años de edad, en las que se determinaron las medidas de los ángulos con goniómetro y Kinect, respectivamente. Se tomaron como puntos de referencia, los valores tomados con el primer método ya que este, es el usualmente usado por los profesionales de la salud. Para el estudio, se realizaron tres repeticiones, con cada uno de los sistemas empleados, estableciendo la media aritmética para cada medición. En la Tabla 1, se muestran las medias obtenidas para cada uno de los métodos empleados (caso de abducción de hombro).
Figura 12.
Amplitud de movimiento usando el goniómetro

Tabla 1
Comparación de las medidas usando el goniómetro y Kinect
Medidas |
Goniómetro |
Kinect |
1 |
30 |
34 |
2 |
60 |
63 |
3 |
90 |
88 |
4 |
120 |
125 |
5 |
150 |
154 |
Como se aprecia en la tabla anterior, los resultados con el goniómetro y con el algoritmo no presentan diferencias relevantes en los valores establecidos. Esto sugiere, que el método que emplea el uso del Kinect para determinar la amplitud de movimiento, podría resultar válido y confiable para ser usado en fisioterapia. Esta metodología, podría resultar más práctica que el uso del goniómetro, que al ser un instrumento manual, está sujeto a errores por la herramienta como tal y errores por parte del operador. Con el Kinect, los ángulos pueden ser calculados de forma práctica y rápida, además, como se mencionó anteriormente el sensor permite el seguimiento efectivo de hasta 20 articulaciones distribuidas alrededor del cuerpo. Sin embargo, se requieren estudios que profundicen en la validez y confiabilidad de éste dispositivo como instrumento de medición de ROM.
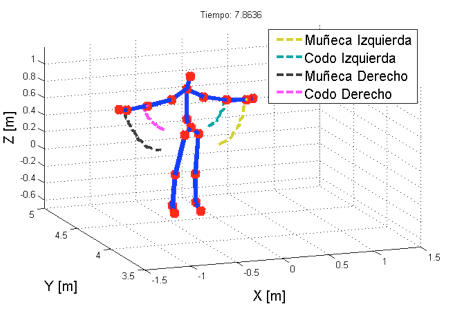
En la Figura 13 se puede apreciar un análisis cinemático tridimensional de un movimiento de abducción desarrollado por cada una de las extremidades superiores de forma simultánea. En esta gráfica se detallan las trayectorias realizadas por cuatros puntos definidos por las dos muñecas y los dos codos.
Figura 13
Trayectorias desarrolladas por los marcadores
en un movimiento de abducción
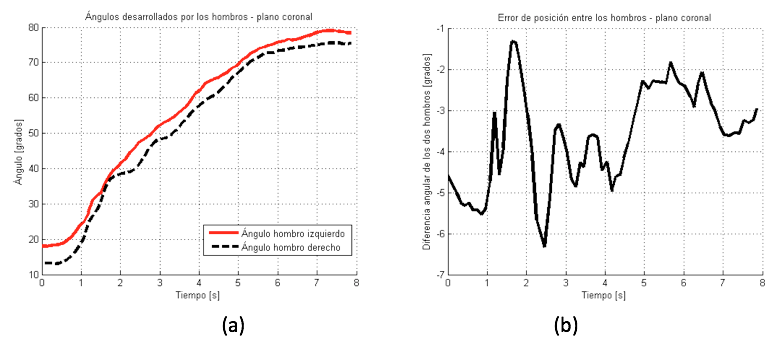
Para el análisis angular del movimiento de abducción, se parte de la localización tridimensional de los hombros, codos y se aplica el procedimiento mencionado en la sección 2.1.3 (Módulo de análisis biomecánico). En la Figura 14a se ilustra un ejemplo del movimiento angular del hombro sobre el plano coronal correspondiente al movimiento de abducción desarrollado en ambos brazos de forma simultánea. En la figura 14b se puede ver que existe una pequeña diferencia entre el hombro derecho o izquierdo, lo cual en caso que llegue a ser significativo podría alertar al especialista para hacer un estudio más profundo.
Figura 14
a) Comparación de los ángulos desarrollados por los dos hombros (plano coronal) al
ejecutar movimientos de abducción de forma simultánea b) Diferencia angular (plano coronal)
entre los dos hombros al ejecutar movimientos de abducción de forma simultánea
Como se mencionó previamente, el sistema es capaz de capturar la evolución temporal de la posición euclidiana de los 20 puntos preestablecidos. Por lo cual, utilizando un procedimiento análogo se pueden realizar estudios de diversos tipos de movimientos para analizar posibles problemas o lesiones.
Figura 15
a) Evolución de la posición Euclidiana desarrollada por la muñeca izquierda al levantar
el brazo b) Velocidades Euclidianas desarrolladas por la muñeca izquierda
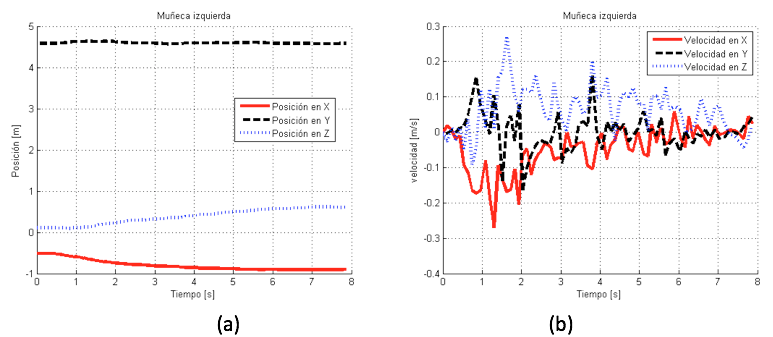
Por ejemplo: en la Figura 15(a) se puede apreciar las componentes de cada una de las coordenadas cartesianas de la trayectoria desarrollada por la muñeca izquierda del usuario, al ejecutar un movimiento de abducción de hombro, para este caso en particular las coordenadas más significativas conciernen a los ejes X y Z correspondientes al sensor Kinect (Plano coronal del usuario). El eje Z en este caso es la distancia a la cual se encuentra ubicado el usuario del sensor. El sistema desarrollado además de calcular la posición de los puntos predeterminados, está en la capacidad de estimar la velocidad en cada una de las componentes cartesianas. Esta característica permitirá a los terapeutas realizar un estudio más intensivo de la evolución de los pacientes. En la Figura 15(b) se ilustra el ejemplo de las velocidades alcanzadas por la muñeca izquierda al levantar el brazo izquierdo.
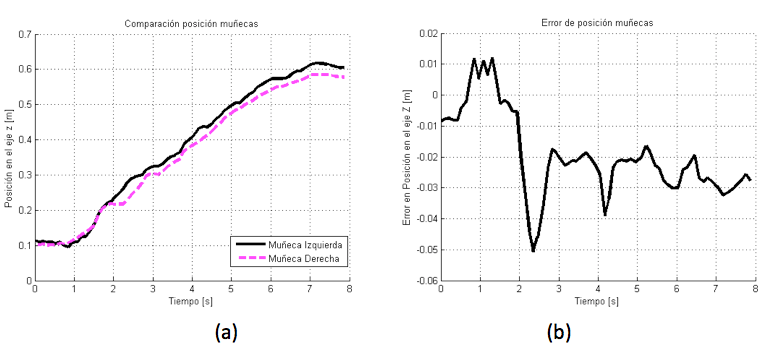
Siguiendo este principio el sistema puede arrojar resultados de comparación entre los diferentes puntos del cuerpo del usuario. Por ejemplo en la Figura 16(a) se presenta una comparación entre las alturas alcanzadas por las dos muñecas del usuario. Esto podría brindarle un indicio al terapeuta indicándole que el paciente tiende a tener el brazo izquierdo por encima del derecho (en el caso que estadísticamente se repita el suceso). Este tipo de información es muy difícil de percibir por un terapeuta utilizando instrumentos convencionales como un goniómetro, debido a que el usuario esta en continuo movimiento. Para ampliar aún más la información el sistema es capaz de generar gráficas de los errores, permitiendo establecer de forma cuantitativa si el error es significativo o no. En la Figura 16(b) se aprecia el error en posición (eje Z) entre las muñecas.
Figura 16
a) Alturas alcanzadas por las muñecas (posición eje z)
b) Error en la posición (eje z) entre las muñecas
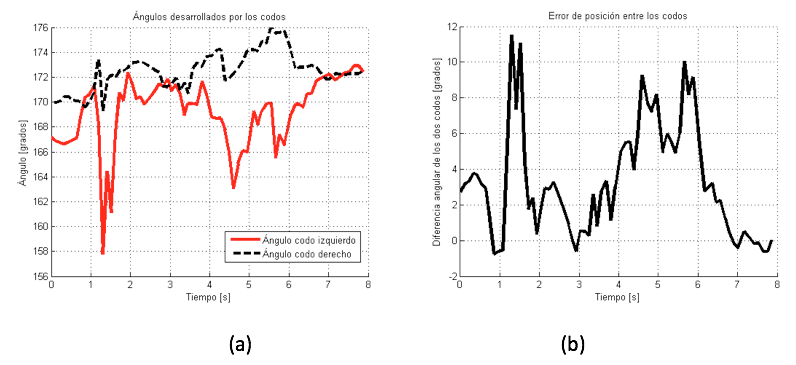
Esta técnica se puede extender para el análisis de otro tipo de articulaciones, ya sea de los miembros superiores o inferiores del cuerpo humano. En las Figuras 17(a) y 17(b) se pueden apreciar las gráficas correspondientes al análisis cinemático (angular) de los dos codos. En la Figura 17(b) se puede se puede estimar claramente que existe una diferencia significativa en el movimiento de los dos codos, razón por la cual lo terapeutas pueden diseñar una serie de ejercicios para que el usuario realice movimientos más armónicos y si es el caso realiza las correcciones de postura pertinentes.
Figura 17
a) Comparación de los ángulos desarrollados por los dos codos al ejecutar movimientos
de abducción de forma simultánea. b) Diferencia angular entre los dos
codos al ejecutar movimientos de abducción de forma simultánea.
Se pudo corroborar que el desarrollo de los dos animatrónicos tipo mariposa y pez que incorporan un ambiente lúdico pueden apoyar la fisioterapia en miembros superiores e inferiores, específicamente para incrementar o ejercitar los movimiento de abducción de hombro y cadera en niños.
La ambientación que fue desarrollada para el escenario de los dos animatrónicos causó bastante interés en los niños que participaron en las pruebas del estudio, dado que los mismos al solo ver los dispositivos comenzaron a realizar preguntas. Algunos de ellos de forma intuitiva y con ayuda de la voz implementada por el sistema, realizaban prácticamente solos los ejercicios, lo cual también demuestra la facilidad de su uso.
La interfaz generada para el ingreso de los parámetros por parte del fisioterapeuta es muy simple e intuitiva lo que permite que los profesionales en rehabilitación no requieran conocimientos computacionales avanzados. Esta permite programar o especificar el avance de los juegos de acuerdo a los requerimientos físicos del usuario.
Los algoritmos captura de los movimientos de los usuarios a través del sensor Kinect permitieron estimar los ángulos de abducción de hombro y de cadera con el fin de servir como parámetros de referencia para el correcto control de los actuadores de los animatrónicos.
El juego se ensayó en 5 niños con rangos de edades comprendidas entre los 8 y 12 años. Se realizaron pruebas, realizando movimientos de abducción de hombro. Los niños atienden correctamente a las indicaciones de los animatrónicos, por lo que les resulta sencillo llevar a cabo el juego.
Para trabajos futuros se pretende validar el método con pacientes que se encuentren en procesos de rehabilitación, este trabajo podría estar a cargo de profesionales o estudiantes de fisioterapia.
Bergmann, T. & Peterson, D. (2010). Joint Anatomy and Basic Biomechanics. Chiropractic Technique, 3(1), 11-23.
Burdea, G., Weiss, P. & Thalmann, D. (2007). Guest Editorial: special theme on virtual rehabilitation, IEEE Transaction on Neural Systems and Rehabilitation Engineering, 15, 1-2.
Brian, A., Primack, A., Carroll, M., McNamara, M., Klem, M., King, B., Rich, M., Chan, Ch. & Nayak, S. (2012). Role of Video Games in Improving Health-Related Outcomes. A Systematic Review, American Journal of Preventive Medicine, 42, 630-638.
Das, D., Grimmer, K., Sparnon, A., McRae, S. & Thomas, B. (2005) The effıcacy of playing a virtual reality game in modulating pain for children with acute burn injuries: a randomized controlled trial. BMC Pediatric, 5, 1-10.
Fitzgerald, D., Trakarnratanakul, N., Smyth, B. & Caulfield, B. (2010). Effects of a wobble board-based therapeutic exergaming system for balance training on dynamic postural stability and intrinsic motivation levels. Journal of Orthopaedic and Sports Physical Therapy, 40, 11-19.
Jannink, M., Van, J., Navis, D., Visser, G., Gussinklo, J. & Ijzerman, M. (2008). A low-cost video game applied for training of upper extremity function in children with cerebral palsy: a pilot study. Cyber-psychology behaviour, 11, 27-32.
Hillman, M. (2004). Rehabilitation robotics from past to present – A historical perspective. Advances in Rehabilitation Robotics, 306, 25-44.
López, D., Hernández, J. & Peña, C. (2013). Avances en el control de plataformas bípedas usando el sistema Kinect. Revista Colombiana de Tecnologías de Avanzada, 22(2), 117-124.
Mendonça, K. & Guerra, R. (2007). Desenvolvimento e validação de um instrumento de medida da satisfação do paciente com a fisioterapia, Revista Brasileira de Fisioterapia, 11, 369-376.
Muñoz, J., Henao, O. & López, J. (2013). Sistema de rehabilitación basado en el uso de análisis biomecánico y videojuegos mediante el sensor Kinect. Revista TecnoLógicas, 30, 43-54.
Raymond, T. (2011). A Wearable Exoskeletal Rehabilitation Robot for Interactive Therapy. Biomechatronics in Medicine and Healthcare, 1, 9-30.
Serra, M., Diaz, J. & Sande, M. (2003). Introducción a la fisioterapia. Fisioterapia en traumatología, ortopedia y reumatología, 2, 3-5.
Shotton, J., Fitzgibbon, A., Cook, M., Sharp, T., Finocchio, M., Moore, R., Kipman, A. & Blake, A. (2011). Real-time human pose recognition in parts from single depth images. IEEE Computer Vision and Pattern Recognition, 20-25.
Sluijs, E., Kok, G. & Van, J. (1993). Correlates of exercise compliance in physical therapy. Physical Therapy, 73, 771-782.
Sullivan, S., Schmitz, T. & Fulk, G. (2007). Examination of motor function: motor control and motor learning. Physical Rehabilitation 5ta Ed, Philadelphia, Davis Company, 161-206.
Tatla, S., Sauve, K., Jarus, T., Virji, N. & Holsti, L. (2014). The effects of motivating interventions on rehabilitation outcomes in children and youth with acquired brain injuries: a systematic review. Journal Brain Inj, 28, 1022-1035.
Taylor, M., McCormick, D., Shawis, T., Impson, R. & Griffin, M. (2011). Activity-promoting gaming systems in exercise and rehabilitation. Journal of Rehabilitation Reserch and rehabilitation, 48, 1171-1186.
Yong, L., Soon, T., Xu, D., Thia, E., Pei, C., Kuah C., Kong K. (2010). A feasibility study using interactive commercial off the shelf computer gaming in upper limb rehabilitation in patients after stroke, Journal of rehabilitation medicine, 42, 437-441.
1. Ingeniero en Mecatrónica, Universidad de Pamplona. jd_botero@hotmail.com
2. Doctor en Automática y Robótica, Profesor Titular del programa de Ingeniería Mecatrónica. Universidad de Pamplona. cesarapc@unipamplona.edu.co
3. Doctora en Ejercicio, fisioterapia y salud. Profesora asociada del programa de Fisioterapia. Universidad de Pamplona. sonia.mantilla@unipamplona.edu.co