![]() ISSN 0798 1015
ISSN 0798 1015

![]() ISSN 0798 1015
ISSN 0798 1015
 Vol. 38 (Nº 20) Año 2017. Pág. 9
Vol. 38 (Nº 20) Año 2017. Pág. 9
William CELIN Mancera 1; Cristian SOLANO Mazo 2; Javier MOLINA Coronell 3
Recibido: 28/11/16 • Aprobado: 13/12/2016
3. Uso del equipo para toma de datos
4. Discusión de los resultados
RESUMEN: Se presenta la construcción y diseño experimental de un plano inclinado con sensores ópticos CNY70, el cual es aplicado en el laboratorio de física mecánica. En este montaje básico se ubica un sensor en la parte superior, el cual puede colocarse en cualquier parte de la longitud del plano y un segundo sensor en la parte inferior, que esta fijo. Se coloca una pieza a una mínima separación del primer sensor, al pasar la pieza se activa y manda la señal al dispositivo micro controlador PIC16F877 iniciando la lectura del conteo de tiempo, cuando la pieza llega al segundo sensor, este manda otra señal al dispositivo y se detiene el conteo. Se establecieron distancias de referencia de un sensor a otro con cierto ángulo, donde los tiempos medidos se registraron en una tabla. Con los resultados se obtuvo la gráfica de posición dependiente del tiempo, el cual describe el comportamiento de un movimiento rectilíneo uniforme acelerado. |
ABSTRACT: It show the construction and design of the experimental arrangement of an inclined plane where two optical sensors CNY70 the physics applications laboratory. In this basic assembly are use two optical sensors, one in the upper side of the plane, which can slide, the other sensor, was located in the lower side, which is fixed. The piece is located in the upper side where the first sensor is, this one must be separated from the second sensor. The piece is located to a minimum separation from the first sensor; the piece become detached, at crossing it is activated and sends the signal to the microcontroller PIC16F877 where the countig stars. While the piece slides, the time is taken; when the piece reaches the second sensor, this one sends a signal and the counting stops. Reference distances between sensors were set, with an angle. With the obtained dates, it made a graphic position against time, which describes the performance of a uniform rectilinear and accelerated motion. |

La necesidad que se presenta en las instituciones educativas con respecto de equipos e instrumentos en el laboratorio de física, ha llevado como iniciativa de incrementar el número de proyectos de aula encaminados en la construcción y diseño de montajes experimentales a bajo costo, con la aplicación de la electrónica básica [1]. Se han utilizado dispositivos como sensores de movimiento, detectores de luz, microcontroladores, software, entre otros, para el diseño y construcción de nuevos dispositivos de medición para manipulación de variables físicas en el laboratorio. Esto además permite mejorar las actividades experimentales en el laboratorio, ayudando a los estudiantes a la construcción y comprensión de conceptos fundamentales de las ciencias físicas, así como también el desarrollo de habilidades y destrezas en aplicación del método científico, resolviendo problemas donde planteen hipótesis y su validación sea con énfasis experimental [2, 3, 4]. La aplicación también de métodos digitales como tabletas y computadores para obtener los gráficos permiten realizar y analizar estos experimentos de plano inclinado en un menor tiempo, si lo comparamos con los métodos manuales utilizando regla y cronometro [5, 6].
La magnitud básica que generalmente se mide en el laboratorio de física mecánica es el tiempo. En este trabajo presentamos una manera sencilla de obtener mediciones de esta variable para un sistema de plano inclinado. Para este tipo de mediciones es usual la utilización de cronómetros precisos y sistemas de adquisición de datos que son muy costosos [7] y que para diferentes instituciones educativas no es alcanzable. Con respecto a esto se han presentado trabajos en aplicaciones de electrónica para mejorar la medición del tiempo y cálculo de constantes físicas en fenómenos cinemáticos y dinámicos. Entre estos la construcción de prototipos para experimentos en rama de la física utilizando fotocompuertas en sistema de rieles [8]. Se han planteado diseños de sistemas para medir el tiempo en movimientos rectilíneos empleando también fotocompuertas, interfaz y software con el programa Matlab [2]. En otros trabajos se han empleado microcontroladores para la construcción de dispositivos didácticos para la toma de tiempo en plano inclinado y movimiento circular uniforme con la finalidad de mejoras en la enseñanza de la física [6]. En este trabajo se presenta un montaje básico y de fácil construcción que permite obtener el tiempo de desplazamiento de una pieza en un plano inclinado, utilizando dos sensores de movimiento muy económicos conectado con un sistema de microcontrolador que registra el tiempo de desplazamiento de la pieza en movimiento.
El sensor CNY70 es un sensor óptico infrarrojo de reflexión. Tiene como características una salida de transistor, su construcción es compacta, tienen un bajo coeficiente de temperatura y filtro óptico. Este dispositivo está compuesto por un receptor y por un emisor encapsulado en un solo componente los cuales están alineados de manera que el receptor pueda recibir el reflejo del emisor al chocar en una superficie.
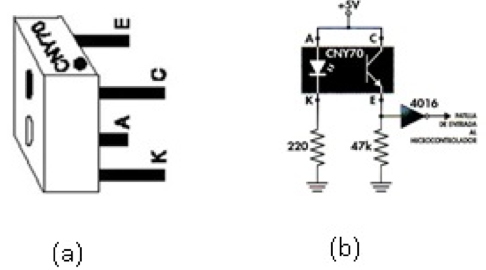
Fig. 1. (a) Esquema de la configuración electrónica del sensor CNY70 [9],
(b) Esquema indicando las partes del circuito [10].
El diodo emisor consta de dos terminales el ánodo (A) y el cátodo (K), el receptor tiene la capacidad de conducir un flujo de corriente entre su emisor (E) y colector (C), la cantidad de corriente que puede fluir por él es proporcional a la cantidad de luz que incide, la superficie a la que apunta el sensor de estar dentro un margen de 3 y 5 mm para obtener una lectura constante y que pueda ser interpretada correctamente por el microcontrolador.
En la figura 1 (a) [9] se muestra la imagen del sensor donde se indican las ranuras cátodo, ánodo, colector y emisor. En la figura 1 (b) [10] se muestra el circuito básico que conecta el sensor al micro controlador. El circuito de la figura 1(b) se muestran dos resistencias de 220 Ω y 47 kΩ que polarizan los diodos y una puerta inversora para llevar la señal a nivel de TTL requerido.
El microcontrolador utilizado para la lectura del tiempo fue un PIC16F877, este dispositivo contiene una memoria de programa tipo FLASH, su consumo de potencia es muy bajo y adicional a esto es completamente estático, es decir, que el reloj puede detenerse y los datos de la memoria no se pierden.
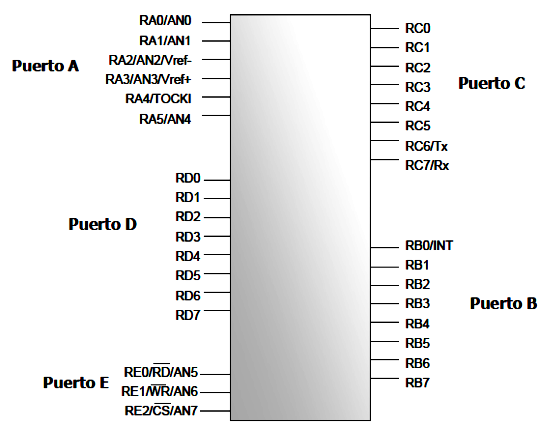
Fig.2. Distribución de los puertos del micro controlador PIC16F877 [11].
Los pines de entrada/salida de este microcontrolador están organizados en cinco puertos, el puerto A con 6 líneas, el puerto B con 8 líneas, el puerto D con 8 líneas y el puerto E con 3 líneas. En el dispositivo de conteo se usó una pantalla de cristal líquido la cual cuenta con dos líneas de 16 cuadros en las cuales se pueden imprimir los caracteres o letras, los pines de entrada de datos y control de la pantalla se encuentran conectados al puerto B del microcontrolador con un cristal de 4 MHz. Dicha frecuencia está dividida al interior de éste en cuatro pulsos, para así obtener un pulso cada microsegundo, por otro lado, los contadores internos del microcontrolador generan el conteo para el cronómetro en los pines del microcontrolador en el Puerto B, las conexiones referentes en la pantalla son (Rb2, Rb3, Rb4, Rb5) tal como se muestran en la figura 4, en estas configuraciones se envían los caracteres o letras.
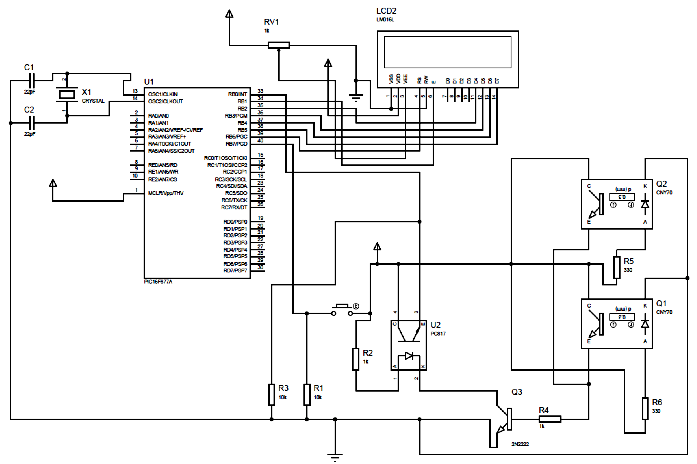
Fig. 3. Esquema del circuito del medidor del tiempo.
Por otro lado, los pines Rb1 y Rb6 se utilizan para el control de la pantalla, siendo configuradas antes como salidas en el micro controlador. La figura 2 [11] muestra el esquema en general que indica la distribución de los pines y los puertos del micro controlador. Posteriormente los pines configurados como entrada se conectan a los sensores y el botón de reset, los sensores son conectados en paralelo al pin (Rb0) permitiendo la entrada de un pulso positivo generando el inicio y terminación del conteo del micro controlador, también es utilizado el pin (Rb7) el cual se conecta el botón o pulsador de reset. La figura 3 muestra el esquema del circuito donde parece el micro controlador PIC16F877 con los elementos electrónicos. La representación del micro controlador en la figura 2 muestra los pines la cual se relacionan con la distribución de los puertos de la figura 3. En los extremos del riel del plano inclinado se colocaron dos sensores CNY70 uno fijo y otro móvil estos sensores se caracterizan por ser infrarrojos utilizando el fenómeno de reflexión para detectar la presencia de un objeto que ha pasado frente a él, dejando circular corriente cuando se interpone un cuerpo de color claro y dejan de hacerlo cuando dicho cuerpo es oscuro, esto se da debido a que los cuerpos oscuros absorben la luz y los claros la reflejan. La señal enviada por el sensor fijo es recibida por el micro controlador PIC16F877 cuya lectura es tiempo del movimiento.
Inicialmente se coloca el cronometro en cero (ver figura 4), se ajusta el plano inclinado al ángulo de referencia escogido, luego se toma la medida de la distancia entre los dos sensores y se suelta la pieza que esta sobre el riel una mínima distancia del sensor 2.
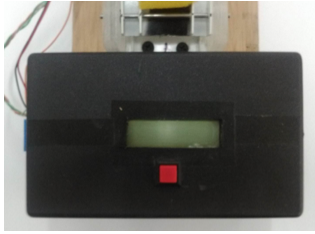
Fig. 4. Medidor del tiempo.
El tiempo se activa en el sensor 2 en el momento que la pieza pase por este y se detiene cuando pase por el sensor 1, la lectura es interpretada por el micro controlador que es tiempo de la distancia recorrida de un sensor a otro, considerando las ubicaciones del sensor 2 y 1 como las posición inicial y final de la pieza en movimiento, respectivamente. La figura 5 muestra el plano inclinado con los sensores. La figura 5 muestra el plano inclinado con los sensores.
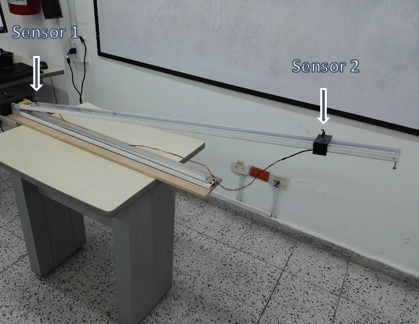
Fig. 5. Plano inclinado para toma de datos
La figura 6 muestra el esquema del plano con la ubicación de los dos sensores y la representación de la pieza que está en movimiento.
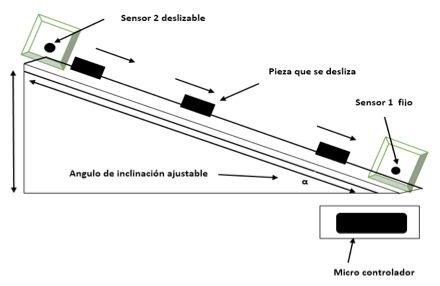
Fig. 6. Esquema del plano inclinado para la toma de los datos
La primera distancia de referencia que se tomó de un sensor a otro, para este caso fue de 0.5m, la cual se incrementó cada 0.1m hasta una distancia máxima de 1m. Se realizó un muestreo de 5 repeticiones por cada distancia recorrida por la pieza y obtuvo el promedio de los tiempos registrados, los cuales son tabulados en la tabla 1, con su respectivo margen de error promedio.
Tabla 1 |
|||
n |
Posición (m) |
Tiempo promedio (s) |
Incertidumbre (s) |
1 |
0.500 |
0.821 |
0.002 |
2 |
0.600 |
1.106 |
0.004 |
3 |
0.700 |
1.204 |
0.003 |
4 |
0.800 |
1.295 |
0.002 |
5 |
0.900 |
1.415 |
0.003 |
6 |
1.000 |
1.444 |
0.004 |
De esta información se obtuvo un gráfico de posición contra tiempo (ver figura 7) en el cual se observa que corresponde a un movimiento uniformemente acelerado. La pieza cuando desciende experimenta un cambio de velocidad teniendo como consecuencia este movimiento.
Los ajustes de los datos tabulados, muestran una leve dispersión, lo que ratifica una buena toma en las medidas en este equipo. Con el ajuste se logró obtener un resultado satisfactorio con la ecuación que representa este movimiento.
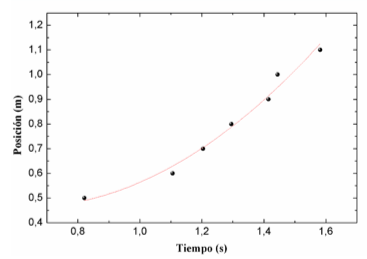
Fig. 7. Grafica de posición versus tiempo del objeto
deslizándose por el plano inclinado con un ángulo fijo °.
Los resultados obtenidos se ajustaron a la ecuación de segundo grado de la forma:

El ajuste cuadrático se realizó con la herramienta análisis. La ecuación ajustada es la siguiente:

Como la situación corresponde al movimiento uniformemente acelerado la ecuación cinemática de posición en función del tiempo que la describe:

Analizando los otros parámetros el parámetro B1 corresponde la velocidad inicial de la pieza, ya que esta al deslizarse por el plano inicia con una rapidez desde antes de pasar por el sensor 2. En este caso se obtiene un signo de ajuste negativo. El parámetro B corresponde al valor de la posición inicial. En la tabla 2 se muestra los valores de los parámetros correspondientes al ajuste cuadrático con la dispersión obtenida.
Tabla 2 Valores correspondientes al ajuste cuadrático |
||
Parámetros |
Valores |
Incertidumbre |
B2 |
0.744 |
0.045 |
B1 |
- 0.904 |
0.032 |
B |
0.724 |
0.023 |
Es importante resaltar que la utilización del equipo es muy fácil para obtener la medida de los tiempos que se adquieren con la ayuda de los sensores que escogieron para este trabajo, los cuales envían la señal al micro controlador que es el que registra el tiempo. Esto si los comparamos con las mediciones manuales utilizando el cronometro. La descripción física de esta práctica puede aproximarse más al fundamento teórico del movimiento, en nuestro caso descrito por el montaje del plano inclinado.
Con la aplicación del plano inclinado con dos sensores se convierte en una herramienta de bajo costo que contribuye a la construcción de los conceptos del laboratorio de física mecánica y permite medir los tiempos que corresponden a la descripción del movimiento rectilíneo uniforme. El montaje con la utilización de los sensores de movimiento permite al estudiante tener una observación del fenómeno y obtener los valores de los tiempos en las distintas posiciones de referencias que se coloquen los dos sensores. Los datos graficados muestran la relación entre posición y tiempo que describen una parábola que corresponden a este movimiento.
J.E. Molina-Coronell y B.P. Rodríguez-Villanueva. (2015). Construcción de un generador electromecánico para la enseñanza de ondas en cuerdas, utilizando generador virtual para Tablet. Revista Mexicana de Física E, 61, 65–68.
R.G. Camero-Berrones, M. Zapata-Torres, O. Calzadilla-Amaya, J. Guillen Rodríguez, y J. Laría-Menchaca. (2012). Desarrollo de un sistema para medir tiempos en movimientos rectilíneos. Revista Mexicana de Física E, 58 18–23.
A. Pontes, J. Gavilán, M. Obrero y A. Flores. (2006). Diseño y aplicación educativa de un programa de simulación para el aprendizaje de técnicas experimentales con sistemas de adquisición de datos. Rev. Eur. Enseñ. Divul. Cien. 3, 251- 257
C. Steidley. (2005) Consortium for computing sciences in colleges, 20 -200.
R. R. Soares, P.F. Borges. (2010). O plano inclinado de Galileu: uma medida manual e uma medida com aquisicao automática de dados. Revista Brasileira de Ensino de Física. 32,2015
C.H. Wörner. (2012). Simplemente: el plano inclinado. Revista Brasileira de Ensino de Física 34,2305
Pasco, (2008-2009) Catalog and Experiment Guide.
C. Collazos Morales. (2010). Construcción de un prototipo para experimentos de mecánica, Lat. Am. J. Phys. Educ. Vol. 4, Suppl. 1.
http://www.infoab.uclm.es/labelec/solar/otros/infrarrojos/sensor_cny70.htm
1. Grupo de investigación PRODUCOM, Universidad de la Costa – Colombia wcelin2@cuc.edu.co
2. Grupo de Investigación GICBAS, Universidad de la Costa. - Colombia
3. Grupo de investigación PRODUCOM, Universidad de la Costa - Colombia