![]() ISSN 0798 1015
ISSN 0798 1015

![]() ISSN 0798 1015
ISSN 0798 1015
Vol. 38 (Nº 12) Año 2017. Pág. 23
Diego Augusto de Jesus PACHECO 1; Giovani GEREMIA 2
Recibido: 20/09/16 • Aprobado: 18/10/2016
RESUMO: O objetivo do presente estudo é apresentar os resultados parciais de um projeto de pesquisa que visa integrar os conhecimentos técnicos de diferentes áreas da engenharia e do design para projetar e construir um robô de formato humanoide. O robô desenvolvido estará apto a percorrer percursos pré-determinados no saguão principal da universidade de forma autônoma, e provido de tela informativa, na qual pode-se apresentar material de marketing, informações diversas da universidade, dos cursos de Engenharia e demais informações de interesse do público. |
ABSTRACT: The aim of this study is to present the partial results of a research project that aims to integrate the expertise from different areas of engineering and design to project and build a humanoid robot format. The robot developed will be able to go predetermined routes in the main lobby of the autonomous university, and provided with information screen, which can display marketing materials, several university information, the engineering courses and other information of interest the public. |

Segundo Vargas (2012) é perceptível que uma conexão entre robótica, ludicidade e o método de ensino aprendizagem em Engenharia pode gerar grandes resultados, tanto para os alunos quanto para o professor, uma vez que seja levado em consideração os principais objetivos e a forma de assimilação de quem utilizará o projeto. Dentro dessa perspectiva, o objetivo principal do presente projeto de pesquisa da Faculdade de Engenharia da UniRitter é integrar conhecimentos técnicos de diferentes áreas da engenharia, de diferentes cursos de engenharias da UniRitter, e de outras áreas, como o design, para projetar e construir um robô formato humanoide. O robô desenvolvido estará apto a percorrer percursos pré-determinados no saguão principal da universidade de forma autônoma, e provido de tela informativa, na qual poder-se-á apresentar em um monitor de LCD (Liquid Crystal Display) informações aos alunos, professores e funcionários oriundos das áreas marketing, informações diversas da universidade, dos cursos de Engenharia e outras interesse do público.
Nesse âmbito, a principal justificativa que sustenta a realização da presente pesquisa em curso são as evidências e resultados de outras pesquisas sobre robótica na engenharias. Para melhorar o desempenho dos alunos de Engenharia, Souza et al. (2012) desenvolveram um projeto cujo ambiente foi possível realizar treinamentos sobre configurações, estratégias de controle, utilização de interface homem-máquina (IHM) e intertravamento de processos, demonstrando aos estudantes de engenharia, tecnologia e, mesmo operadores industriais, métodos para a implementação, testes e validações de configurações de controle e supervisão de processos complexos multivariáveis, parecidas com as encontradas nas indústrias.
Júnior et al. (2012) desenvolveram o ROLE (RObotics Learning Environment), um simulador de robô articulado que exerce um papel (role) diferente pois, além de simular um ambiente robotizado rico em recursos, propõe um amplo conjunto de tarefas robotizadas e embute a estrutura do conteúdo usando a metodologia do Espaço de Habilidades que, ajuda a organizar, dividir e apresentar todo o conteúdo de um curso de robótica a um aprendiz.
Para Zeplin e Borba (2012) a robótica pedagógica vem sendo utilizada com sucesso nos diferentes níveis de ensino como forma de estimular e desafiar o estudante na prática de resolução de problemas. Mas existem diferentes topologias de robôs móveis que podem ser utilizadas o que pode levar ao professor a dúvida de qual topologia mais adequada. Os autores fizeram a avaliação de diferentes topologias de robôs móveis aplicados a robótica educativa. Foram selecionadas algumas topologias e montadas utilizando kits de robótica sendo apresentadas e discutidas.
O projeto desenvolvido atendeu as expectativas iniciais que eram de fazer uma revisão bibliográfica sobre robótica educativa, foram encontrados diversos artigos, sendo selecionados alguns que dessem uma panorâmica de aplicação. O projeto reforçou a necessidades de desenvolver projetos com esse intuído para oferecer ao público brasileiro uma alternativa de discussão mais elaborada sobre a construção de robôs móveis com intuito da aplicação em robótica móvel. Dessa maneira, pode-se afirmar que o uso de robôs no ambiente de ensino das Engenharias seja no cenário brasileiro, quanto internacional é uma tendência de caminho.
Inicialmente foi selecionada a equipe de trabalho. Além de dois professores, dos cursos de Engenharia de Produção e Engenharia Mecânica, fizeram parte do projeto, alunos dos cursos de: Design, Engenharia Mecânica, Engenharia de Controle Automação e Engenharia Elétrica. Quanto aos procedimentos metodológicos, a primeira etapa do desenvolvimento do projeto compreendeu a pesquisa do estado da arte na literatura dos projetos no contexto brasileiro, sobre o artefato a ser elaborado: um robô humanoide. Na etapa posterior, os pesquisadores da equipe do projeto tiveram a atribuição de coletar e processar o maior número de informação possível sobre os equipamentos existentes. Esta etapa inclui pesquisa dos parâmetros mecânicos, elétricos e eletrônicos, e seleção de materiais para construção e simulação do projeto virtual. Nesta etapa a equipe irá elaborar o projeto conceitual, onde será definido o melhor formato do produto, abrangendo principalmente desenhos conceituais em 2D e 3D de robôs em formato humanoide já existentes e a observação dos resultados da pesquisa de revisão sistemática da literatura.
A segunda macro etapa do projeto foi a de projeto e fabricação de protótipo onde ocorrerá o projeto do protótipo do robô, abrangendo projeto mecânico, elétrico e de controle, além da definição das rotinas de testes para o equipamento, seguindo os resultados das pesquisas. O projeto mecânico consistiu em um processo iterativo para dimensionar as peças. Estas serão projetadas em software CAD para, em seguida, serem analisadas pelo método de elementos finitos. A partir dos dados de esforços mecânicos obtidos desta análise, estas peças podem vir a ser reavaliadas, fechando o ciclo.
O projeto de hardware consiste na pesquisa de componentes eletrônicos e de acionamento que sejam adequados para o equipamento, projeto dos circuitos elétricos e montagem de placas de circuito impresso. Já o projeto de software será constituído de rotinas de programação que orientarão o robô ao longo do percurso proposto, respeitando as deliberações previamente estabelecidas no projeto conceitual. Finalizando a etapa estão os desenhos mecânicos, eletroeletrônicos e linhas de programação, a fabricação mecânica e eletrônica, a implementação do controle e sua montagem.
Na terceira macro etapa serão realizados os testes para qualificação. Esta etapa objetiva validar e garantir o funcionamento do protótipo quanto ao processo de movimentação proposto no projeto. Para isto será necessário realizar testes em escala real no ambiente de movimentação do equipamento. Estes testes visam avaliar e validar o funcionamento do sistema sobre condições reais.
Nesse sentido, vários parâmetros deverão ser avaliados, tais como velocidades, precisão e segurança. A partir dos testes e rotinas avaliados na etapa anterior será realizada uma listagem de observações críticas que serão a principal fonte de informação para a conclusão bem sucedida desta etapa. A otimização do conceito será uma das principais atividades da equipe de trabalho na presente etapa. Na quarta etapa prevista, será feita a fabricação do equipamento final. O objetivo desta etapa é produzir o robô final para apresentação, baseado nas informações obtidas nos ensaios e testes, visando à versão final do equipamento.
A primeira etapa do projeto compreendeu a pesquisa do estado da arte sobre exemplos robôs humanoides. Nessa etapa o grupo de pesquisadores identificou exemplos de robôs. Em seguida, o grupo realizou julgamento entre as opções: quanto aos seguintes critérios: i) aderência ao formato humanoide; ii) complexidade de execução; iii) tecnologia embarcada necessária para garantir a funcionalidade em relação ao seu design; iv) recursos disponíveis aos pesquisadores (infraestrutura, materiais, pessoal, equipamentos e financeiros). A primeira análise e julgamento foi feita em relação ao formato. Os robôs analisados estão apresentados na figura 1.
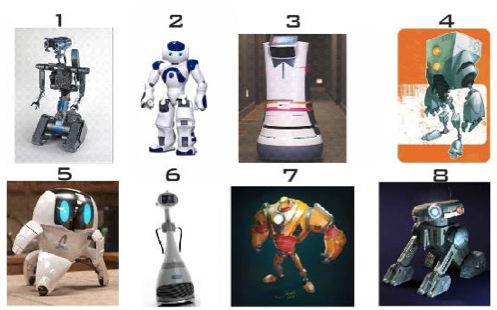
Figura 1: Modelos de robôs humanoides avaliados. Fonte: robopromobot (2015).
Uma vez definidas opções de modelos, o grupo de pesquisadores realizou entrevistas presenciais com 53 alunos de graduação no saguão do prédio A. O perfil dos respondentes escolhido foi composto por alunos que costumam frequentar o prédio A, que é onde o robô será instalado e irá circular. O resultado das respostas está apresentado na Tabela 1.
Tabela 1 – Respostas quanto à estrutura do robô.
Opção de estrutura do robô |
Número de respostas |
% de respostas |
Opção 1 |
5 |
9,3% |
Opção 2 |
18 |
33,3% |
Opção 3 |
0 |
0 |
Opção 4 |
1 |
1,9% |
Opção 5 |
10 |
18,5% |
Opção 6 |
8 |
14,8% |
Opção 7 |
7 |
13% |
Opção 8 |
5 |
9,3% |
TOTAL |
100% |
|
A segunda etapa de julgamento compreendeu a definição da face do robô. Foram identificados oito modelos pelos membros do grupo de pesquisa conforme figura 2.
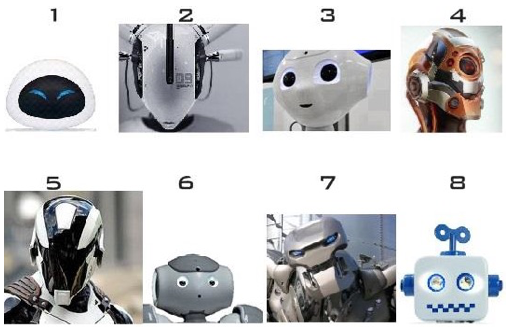
Figura 2: Modelos de faces humanoides avaliadas pelos pesquisadores. Fonte: google (2015).
Após definidas as opções de modelos, o grupo de pesquisadores realizou entrevistas presenciais com os mesmos 53 alunos de graduação anteriores. O resultado das respostas está apresentado na Tabela 2:
Tabela 2 – Respostas quanto à face do robô
Opção de face de robô |
Número de respostas |
% de respostas |
Opção 1 |
5 |
9,3% |
Opção 2 |
18 |
33,3% |
Opção 3 |
0 |
0 |
Opção 4 |
1 |
1,9% |
Opção 5 |
10 |
18,5% |
Opção 6 |
8 |
14,8% |
Opção 7 |
7 |
13% |
Opção 8 |
5 |
9,3% |
TOTAL |
100% |
|
Uma vez feita a escolha da forma e face do robô humanoide a próxima etapa desenvolvida foi desenhar os modelos escolhidos pelos pesquisadores. Essa etapa é prévia à etapa de modelagem 3D no computador. As figuras 3, 4, e 5 a seguir apresentam os desenhos realizados.
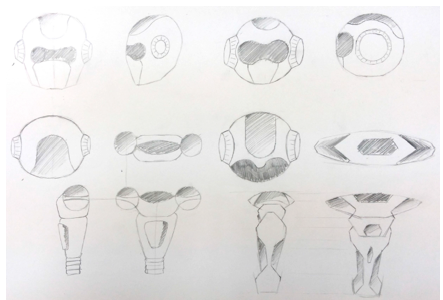
Figura 3: Modelagem da face e estrutura. Fonte: dados da pesquisa.
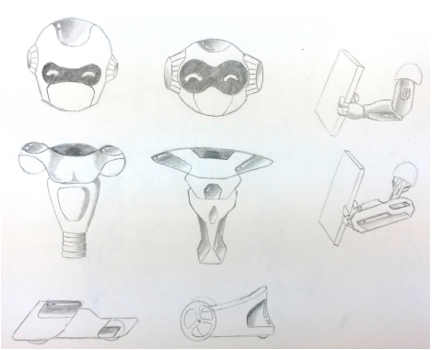
Figura 4: Modelagem da face e estrutura. Fonte: dados da pesquisa.
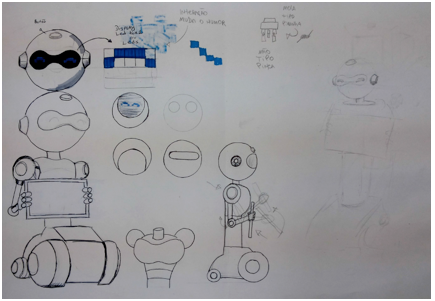
Figura 5: Modelo completo. Fonte: dados da pesquisa.
Depois de feito os croquis do modelo escolhido, os pesquisadores iniciaram a construir o primeiro protótipo em tamanho real final conforme apresentado na Figura 6. Nessa etapa do projeto, foram adotadas estratégias de prototipagem específicas de design de produtos. A equipe de pesquisadores do curso de Design atuou de forma decisiva nessa etapa aplicando as técnicas de modelagem, que os alunos aprendem ao longo do curso de Design de Produto.

Figura 6: Protótipo de modelo. Fonte: dados da pesquisa.
Visando atribuir caráter sustentável ao projeto, materiais recicláveis foram escolhidos para fazer a montagem do protótipo inicial. O objetivo desse protótipo foi avaliar questões de dimensões e formas gerais do robô. Diversas oportunidades de melhorias foram percebidas durante essa etapa. Depois de feitas essas melhorias no conceito e forma do robô, a etapa seguinte consistirá no desenvolvimento do robô em um protótipo usando materiais idênticos aos especificados no projeto. Apenas depois de validado esse protótipo é que será construída a versão definitiva do robô humanoide pelos pesquisadores.
O objetivo desse estudo foi apresentar os resultados parciais de um projeto de pesquisa que integra os conhecimentos técnicos de diferentes áreas da engenharia para projetar e construir um robô de formato humanoide. A primeira etapa do projeto está em fase de conclusão. Atualmente o projeto está sendo modelado em 3D em computador em software específico de engenharia.
Devido à complexidade e custo do projeto, os pesquisadores estão empenhados em fechar parcerias com patrocinadores para o projeto. Com o projeto pretende-se gerar, além do próprio produto desenvolvido como ferramenta de trabalho da instituição, expertise de desenvolvimento robótico para futuros projetos, desde a evolução do próprio produto até a de novos produtos para novas demandas observadas à partir na funcionalidade deste.
Estes resultados podem ser disseminados à comunidade acadêmica como estudo para desenvolvimento de artigos acadêmicos e trabalhos universitários nas disciplinas dos cursos envolvidos, servindo de ferramenta de trabalho para professores e alunos em sala de aula. Ainda, o próprio robô elaborado pode incentivar os alunos da instituição para criação de novos projetos, referenciando e melhorando a metodologia utilizada no desenvolvimento do mesmo. Por fim, está previsto a divulgação dos resultados do presente projeto na Semana Acadêmica da Engenharia e no evento da XI Semana de Pesquisa do Centro Universitário Ritter dos Reis - SEPesq.
Os pesquisadores do projeto agradecem à Pró-Reitoria de Pesquisa, Pós-Graduação e Extensão, à ProGrad, à Direção da Faculdade de Engenharia, à Faculdade de Design, ao professor Claudio Salvalaio pelo apoio dado aos pesquisadores e bolsistas para as atividades e andamentos do projeto. Os pesquisadores agradecem de forma especial aos pesquisadores bolsistas que atuaram nessa etapa do projeto.
VARGAS, M. N. et al. Utilização da robótica educacional como ferramenta lúdica de aprendizagem na engenharia de produção: introdução a produção automatizada, XL COBENGE, 2012.
Pereira, M. C. et al. Projetos de integração da engenharia da UCDB e cursos técnicos do IFMS, XL COBENGE, 2012.
SOUZA, J. P. P. Unindo a teoria e a prática no ensino de automação industrial e controle de processos, XL COBENGE, 2012.
JÚNIOR, S. B. et al. ROLE – Um sistema que exerce um papel diferente no ensino de robótica, XL COBENGE, 2012.
ZEPLIN, R. S; BORBA, R. R. de S. Projeto e validação experimental de topologias de robôs móveis aplicadas a robótica educacional. XL COBENGE, 2012.
1. Faculdade de Engenharia, Departamento de Engenharia de Produção. Centro Universitário Ritter dos Reis – UniRitter. Email: diego_pacheco@uniritter.edu.br
2. Faculdade de Engenharia, Departamento de Engenharia de Produção. Centro Universitário Ritter dos Reis – UniRitter. Email: giovani_geremia@uniritter.edu.br