![]() ISSN 0798 1015
ISSN 0798 1015

![]() ISSN 0798 1015
ISSN 0798 1015
Vol. 38 (Nº 61) Año 2017. Pág. 5
Heyder PAEZ-LOGREIRA 1; Elkin RAMIREZ-CERPA 2; Luis DIAZ-CHARRIS 3; Sandra LOPEZ-TORRES 4; Carlos MIRANDA-PUPO 5
Recibido: 18/08/2017 • Aprobado: 15/09/2017
RESUMEN: Los sistemas de calefacción, ventilación y aire acondicionado (HVAC), son tecnologías desarrolladas para brindar confort ambiental en un recinto cerrado. En ciudades con altas temperaturas el consumo energético de un sistema HVAC puede aumentar considerablemente, e inclusive, impedir que el sistema logre la temperatura deseada (set-point). Por esto, se desarrolla un control automático del set-point para sistemas de HVAC a través de la plataforma Arduino que permita un consumo energético eficiente y racional. |
ABSTRACT: Heating, ventilation and air conditioning (HVAC) systems are technologies developed to provide environmental comfort indoors. In cities with high temperatures, the energy consumption of an HVAC system can considerably increase, even prevent the system from achieving the desired temperature. For this, we present an automatic linear control of the point system for HVAC systems through the Arduino platform that allows an efficient and rational energy consumption. |

Un sistema de calefacción, ventilación y aire acondicionado (HVAC, del inglés para Heating, Ventilation and Air Conditioning) permite controlar el movimiento, la calidad y temperatura del aire en un recinto cerrado. Los sistemas HVAC contribuyen significativamente al consumo de energía en edificaciones, y son objeto de investigación para la eficiencia energética, (Afram & Janabi-Sharifi, 2015).
El campo de la eficiencia energética en edificaciones ofrece oportunidades desafiantes en el área de las teorías y técnicas de control. Los sistemas HVAC en edificios deben ser controlados con precisión, para asegurar la comodidad de los ocupantes y reducir el consumo de energía (Satyavada, Babuška, & Baldi, 2016). Así, mejorar la eficiencia energética en edificaciones y mantener el confort térmico es un tema importante en las últimas décadas, lo que incluye mejorar la eficiencia de los sistemas de HVAC. Un acercamiento a este objetivo es utilizar mejores métodos de control (Belic, Hocenski, & Sliskovic, 2015).
Los equipos que conforman un sistema de HVAC tradicionales, tales como compresores de encendido y apagado, se están reemplazando por módulos escalonados o modulados (por ejemplo, tipo inverter), requiriendo nuevas arquitecturas de control avanzadas. Sin embargo, el funcionamiento y la eficiencia de los sistemas HVAC depende en parte de factores externos a este: la temperatura interna del lugar (temperatura interna); la temperatura en el ambiente externo del mismo (temperatura externa) y el valor deseado de temperatura (set-point), entre otros.
De manera específica, en los sistemas HVAC diseñados como acondicionadores de aire para refrigeración se disminuye la capacidad de regular las condiciones de tempratura a razón del aumento de la diferencia entre las temperaturas interna y externa. En situaciones de mayor temperatura externa, el sistema requiere de mayor trabajo y tiempo para llegar a la temperatura interna deseada, toda vez que pueda alcanzarlo. Cuando el sistema no alcanza la temperatura deseada, debe trabajar de manera constante, sin reposo, ocasionando mayor consumo de energía aún sin conseguir el confort esperado por el usuario.
El diseño del sistema de control de climatización para proporcionar un equilibrio óptimo entre confort y el consumo de energía es un problema difícil (Chinde et al., 2016). Múltiples técnicas de control se estudian y desarrollan para solucionar este problema (Afram & Janabi-Sharifi, 2015).
En este artículo se propuso el desarrollo de un control automático para el ajuste del set-point de un sistema de HVAC de refrigeración, de acuerdo a la temperatura externa o ambiental. De esta manera, el control asegurará que el sistema alcance la temperatura interna más baja y cercana al valor esperado por el usuario. Esto permite que el sistema de refrigeración entre en reposo con mayor frecuencia y se optimice el consumo de energía eléctrica, sin afectar el máximo confort que puede alcanzar el sistema para determinada temperatura externa. La solución envuelve la construcción de un modelo a escala, gobernado por una placa Arduino. Este proyecto es un aporte a la eficiencia en el consumo energético de los sistemas de aire acondicionado y al cuidado del medio ambiente.
El artículo está organizado como sigue. En la sección 2 se presentan algunos antecedentes de desarrollos técnicos y científicos que soportan el proyecto realizado. En la sección 3 se presentan los materiales y métodos utilizados en el desarrollo de este trabajo. La sección 4 realiza la descripción técnica de la propuesta. En la sección 5 se muestran los resultados de las pruebas realizadas. Las conclusiones se muestran en la sección 6.
Diferentes investigaciones han estudiado el potencial consumo de los sistemas residenciales de HVAC, por lo cual se analizan diferentes alternativas de control y gestión del consumo en ello. Tal es el caso de la gestión dinámica de la demanda, realizada mediante modelos térmicos de siete casas en Austin, Texas. El estudio demuestra que los modelos lineales, como al que se aproxima esta propuesta, son razonablemente precisos para predecir los cambios de temperatura en interiores. Los modelos térmicos considerados se integraron en una metodología de gestión orientada a la demanda basada en la planificación. La metodología resultante es capaz de disminuir considerablemente el perfil de carga de las casas consideradas (van der Klauw et al., 2016).
Mata, Martínez, Camilo, Malvez, & Sánchez (2012) publicaron el trabajo denominado “Desarrollo de un equipo didáctico de bajo costo para el control de temperatura”. El objetivo del trabajo fue diseñar un prototipo didáctico de bajo costo y de fácil implementación compuesto por un controlador Proporcional Integral y Derivativo (PID), encargado de regular la temperatura de un disipador de calo conectado a una lámpara de bulbo. Para el enfriamiento, emplearon un ventilador de corriente directa (CD) cuya velocidad era modificada mediante la Modulación de Ancho de Pulsos (PWM). El algoritmo de control fue implementado en un Arduino UNO manipulado mediante el programa Labview 8.5 Edición Estudiantil de National Instruments. Los resultados obtenidos indicaron que el controlador respondía de manera adecuada a las variaciones de la señal de referencia.
Los autores Gelvez-Arocha, Quiroga-Mendez, Barajas-Merchan, & Gomez-Sarmiento, (2013) implementaron tres estrategias de control sobre un sistema de refrigeración. Estas estrategias fueron: control On-Off, control Proporcional Integral Derivativo (PID) y control por Lógica Difusa. A partir de las mismas, se comparó cuál de las estrategias era capaz de alcanzar y mantener la temperatura de referencia; también, se contrastó el consumo de energía para cada tipo de control. En este trabajo, se indicaron los siguientes elementos como determinantes en el consumo de energía del sistema: (1) temperatura del ambiente externa, (2) temperatura de referencia, (3) carga térmica a extraer y, (4) perturbaciones del sistema.
Como resultado, se obtuvo que el control On-Off ofrecía una respuesta más rápida en la consecución de la temperatura de referencia, pero presenta fluctuaciones alrededor de ésta. En otras palabras, no mantiene la temperatura de referencia. Por su parte, el control PID presentó menores fluctuaciones alrededor de la temperatura de referencia, y el control Difuso no llegó a la temperatura de referencia que se le proporcionó. En lo que concierne al consumo energético, se concluyó que: el control On-Off es el que mayor consumo de energía tiene, puesto que el sistema trabaja siempre a su mayor capacidad; en contraste, el control PID y el Difuso mantienen al sistema en distintos puntos de consumo, ya sea alto o bajo.
Por su parte, Bravo-Montenegro & López-Ortega (2009) diseñaron un sistema de refrigeración mediante recirculación de agua para el destilador de un laboratorio. Con el diseño de un control Proporcional Integral (PI) mantuvieron constante la temperatura del refrigerante del sistema. El controlador se implementó en un PIC18F452, y una pantalla LCD para visualizar los valores de las temperaturas de diferentes partes del sistema y otros datos. El sistema también controla el flujo del agua por el intercambiador de calor, mediante electroválvulas.
La lógica difusa es útil para detectar patrones de comportamiento que generalmente ocurren en un edificio. En el caso de los sistemas de climatización, se pueden detectar situaciones para decidir entre maximizar el confort y/o maximizar el ahorro. Se han desarrollado investigaciones para la obtención de metodologías que impacten el ahorro de energía mediante este tipo de sistemas, que proporcionan información importante y útil para la selección del punto de ajuste del confort de las salas de un sistema de climatización central, sin necesidad de utilizar valores fijos basados en los programas horarios u otras metodologías (Aparicio-Ruiz, Valverde, & Giménez, 2010).
La tecnología electrónica utilizada en los sistemas HVAC es muy importante. Arduino ha surgido como una plataforma aplicable a entornos industriales en la implementación de sistemas de control y monitoreo. Se han desarrollado proyectos en el entorno empresarial orientados a sistemas HVAC, basado en la tecnología termoeléctrica en una aplicación especial utilizando Arduino (Kravtcova, 2015).
Otros estudios, demuestran que estrategias sencillas, tales como el ajuste del punto deseado o de ajuste (set-point) de la temperatura, pueden dar lugar a importantes ahorros de energía sin mayores costos financieros. A pesar de ello, todavía no está claro si este tipo de estrategias de operación pueden tener consecuencias no deseadas en otros parámetros como la comodidad y la productividad térmica de los ocupantes (Papadopoulos & Azar, 2016).
Este escenario, conduce a una oportunidad para la adopción de enfoques alternativos y novedosos por parte de la industria: los métodos prometedores son métodos formales recientemente desarrollados para la síntesis de controladores y las tecnológicas orientadas a arquitectura de servicios y cloud computing (Bernal, Caballero, Sánchez, & Paez-Logreira, 2016; Holub, Zamani, & Abate, 2016).
El proyecto realizado corresponde a la tipología desarrollo experimental, y su alcance es exploratorio. Técnicamente, el objetivo es regular la temperatura de un recinto cerrado mediante el control automático del set-point de un sistema de HVAC. En particular, el sistema desarrollado ajusta el set-point de acuerdo a la temperatura externa o ambiente, y determina cuando el sistema de refrigeración no puede alcanzar la temperatura deseada por el usuario.
Para determinar el comportamiento del sistema se realizaron 8 pruebas, en las que varía el estado inicial de las temperaturas externa, interna y set-point del usuario.
Inicialmente el set point del sistema lo determina el usuario, luego, el controlador calcula el set-point ideal, de acuerdo a la variables temperatura externa y temperatura interna, y lo ajusta si es necesario.
Cuando se ingresa un set-point mayor al set-point ideal, se mantiene el set-point que el usuario ingresó (el usuario desea menos frio que el posible por el sistema en las circunstancias particulares). En caso contrario, se cambia el set-point del usuario por el set-point ideal (el máximo frio posible para el sistema en las circunstancias particulares).
En el prototipo, el set-point del usuario es ingresado mediante un teclado matricial y se visualiza en una pantalla LCD. En la pantalla también se pueden observar la temperatura interna y externa tomada por los sensores de temperatura.
En las tablas y gráficos, tin simboliza la temperatura interna, tex la temperatura externa y sp el set-point del usuario; todas estas variables se grafican en función del tiempo. Las pruebas se agruparon en las siguientes situaciones:
Se realizaron 3 pruebas para analizar la respuesta del sistema en esta situación. Los datos de las condiciones de temperatura iniciales y los resultados de las pruebas se muestran en las tablas 1, 2 y 3, también, en las figuras 9, 10, 11. Para corroborar los resultados de la Situación 1 se llevaron a cabo dos pruebas, con el mismo set point pero temperaturas externas diferentes.
Tabla 1
Resultados Situación 1 - Pruebas 1 y 2
Situación 1 - Prueba 1 |
Situación 1 - Prueba 2 |
|||||||
Tiempo(s) |
Tin(°C) - Caso 1 |
SP (°C) - Caso 1 y 2 |
Tex(°C) - Caso 1 |
Tiempo(s) |
Tin(°C) - Caso 2 |
SP(°C) - Caso 2 |
Tex(°C) - Caso 2 |
|
0 |
34 |
30 |
34 |
0 |
37 |
30 |
37 |
|
36 |
31 |
30 |
34 |
15 |
36 |
30 |
37 |
|
60 |
30 |
30 |
34 |
41 |
35 |
30 |
37 |
|
75 |
30 |
30 |
34 |
75 |
35 |
30 |
37 |
|
Gráfica 1
Resultados Situación 1 – Casos de prueba 1 y 2
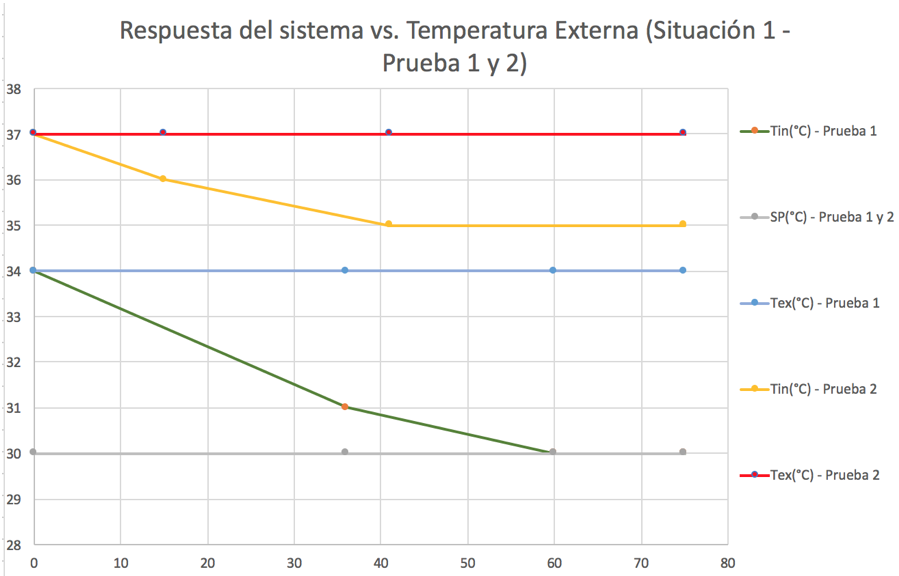
Se observa que a medida que la temperatura externa aumenta, el sistema no es capaz de lograr el valor deseado (set-point) de temperatura interna. Esto en técnicas de control se conoce como un error en estado estacionario. En el caso de los sistemas de refrigeración este error se debe a las limitaciones de la capacidad de enfriamiento del equipo. Para validar la situación 1, se realizó una tercera prueba con otro set point.
Tabla 2
Resultados Situación 1 – Prueba 3
Tiempo(s) |
Tin(°C) - Prueba 3 |
SP(°C) - Prueba 3 |
Tex(°C) - Prueba 3 |
0 |
40 |
38 |
40 |
12 |
39 |
38 |
40 |
34 |
38 |
38 |
40 |
82 |
38 |
38 |
40 |
260 |
38 |
38 |
40 |
380 |
38 |
38 |
40 |
630 |
37 |
38 |
40 |
710 |
38 |
38 |
40 |
790 |
38 |
38 |
40 |
850 |
38 |
38 |
40 |
Gráfica 2
Resultados Situación 1 – Prueba 3
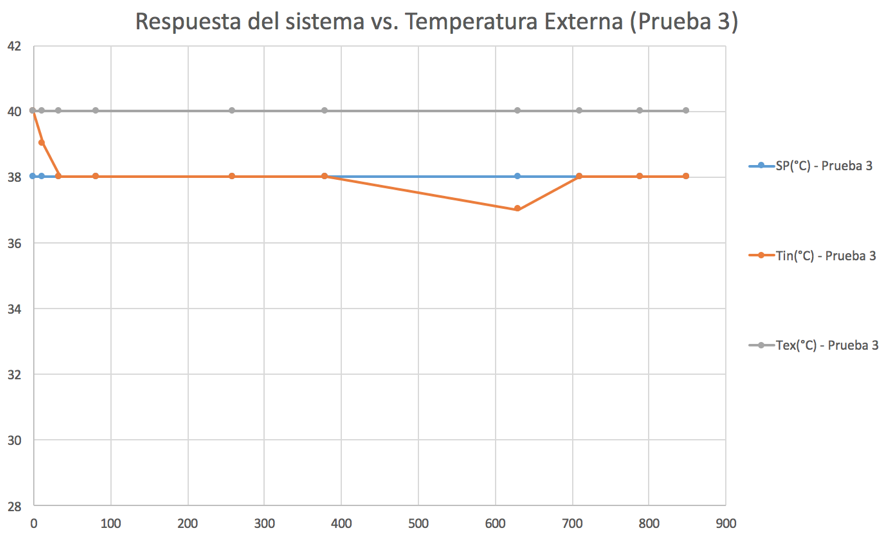
En la Prueba 3 el sistema fue capaz de alcanzar el set-point del usuario, aunque se observó que a los 630 segundos de haber iniciado la prueba hubo una caída de la temperatura en 1°C, luego a los 710 segundos vuelve al set-point del usuario.
De los resultados se deduce que el sistema piloto puede disminuir la temperatura interna en máximo 2°C por debajo de la temperatura externa. En otras palabras, el sistema no podrá alcanzar un set-point del usuario inferior a la temperatura externa menos 2°C. Claro está, para un sistema de refrigeración real los valores alcanzados de temperatura interna son mucho menores y con mayor diferencia a la temperatura externa.
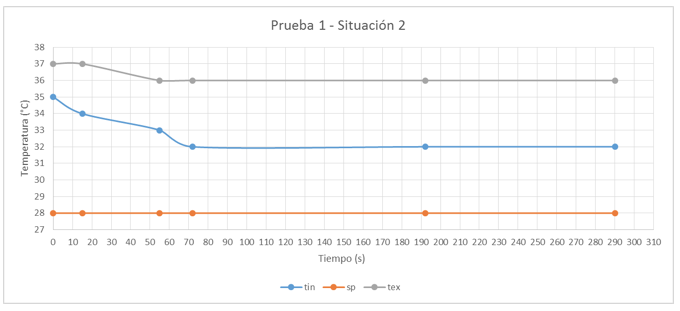
Los datos de las condiciones de temperatura iniciales y los resultados de las pruebas para la situación 2 se muestran en las tablas 4, 5 y 6; también, en las figuras 12, 13 y 14.
Tabla 3
Situación 2 – Prueba 1
tiempo(s) |
tin(°C) |
sp(°C) |
tex(°C) |
0 |
35 |
28 |
37 |
15 |
34 |
28 |
37 |
55 |
33 |
28 |
36 |
72 |
32 |
28 |
36 |
192 |
32 |
28 |
36 |
290 |
32 |
28 |
36 |
-----
Gráfica 3
Resultados Situación 2 – Prueba 1
-----
Tabla 4
Situación 2 – Prueba 2
tiempo(s) |
tin(°C) |
sp(°C) |
tex(°C) |
0 |
39 |
35 |
40 |
37 |
38 |
35 |
40 |
120 |
38 |
35 |
40 |
200 |
38 |
35 |
40 |
270 |
38 |
35 |
40 |
340 |
38 |
35 |
40 |
480 |
38 |
35 |
40 |
550 |
38 |
35 |
40 |
630 |
38 |
35 |
40 |
760 |
38 |
35 |
40 |
-----
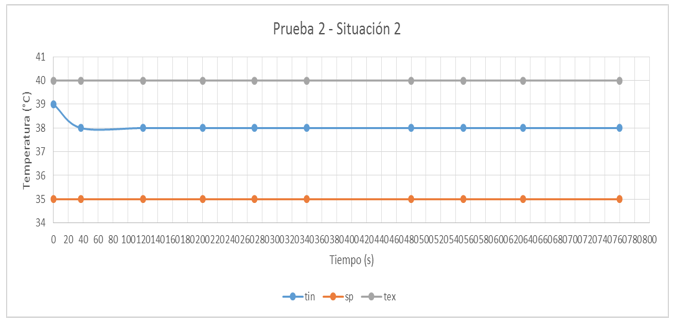
Gráfica 4
Resultados Situación 2 – Prueba 2
-----
Tabla 5
Situación 2 - Prueba 3
tiempo(s) |
tin(°C) |
sp(°C) |
tex(°C) |
0 |
35 |
30 |
40 |
44 |
36 |
30 |
40 |
150 |
36 |
30 |
40 |
200 |
37 |
30 |
40 |
300 |
37 |
30 |
40 |
390 |
38 |
30 |
40 |
480 |
38 |
30 |
40 |
600 |
38 |
30 |
40 |
720 |
38 |
30 |
40 |
780 |
38 |
30 |
40 |
-----
Gráfica 5a
Resultados Situación 2 - Prueba 3
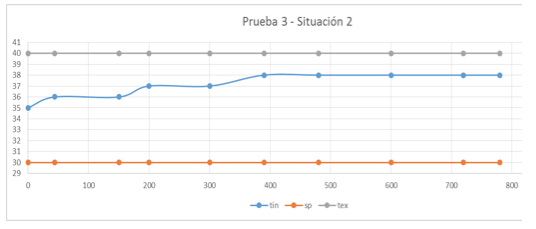
Los resultados obtenidos en la Situación 2 son similares a los resultados de la Situación 1. El sistema para la prueba piloto no puede bajar la temperatura interna más de 2°C por debajo de la temperatura externa. Por otro lado, en la prueba 3 se observó que la temperatura interna era 5°C menor que la temperatura externa, al encender el sistema la temperatura interna se elevó a 38°C, en vez de disminuir y alcanzar el set-point. Si bien, este es un caso extrañamente replicable en la realidad de un sistema de refrigeración, denota la incapacidad de los mismos para alcanzar ciertos valores esperados por el usuario en condiciones de extremas temperaturas externas (elevadas con respecto a la temperatura del recinto o la esperada por el usuario).
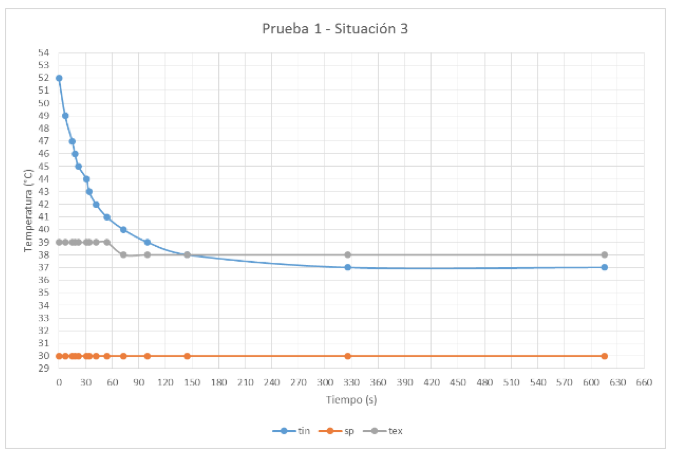
Los datos de las condiciones de temperatura iniciales y los resultados de las pruebas se muestran en las tablas 7, 8 y 9; también, en las figuras 15, 16 y 17.
Tabla 6
Situación 3 - Prueba 1
tiempo(s) |
tin(°C) |
sp(°C) |
tex(°C) |
0 |
52 |
30 |
39 |
7 |
49 |
30 |
39 |
15 |
47 |
30 |
39 |
18 |
46 |
30 |
39 |
22 |
45 |
30 |
39 |
31 |
44 |
30 |
39 |
34 |
43 |
30 |
39 |
42 |
42 |
30 |
39 |
54 |
41 |
30 |
39 |
73 |
40 |
30 |
38 |
100 |
39 |
30 |
38 |
145 |
38 |
30 |
38 |
326 |
37 |
30 |
38 |
615 |
37 |
30 |
38 |
-----
Figura 5b
Resultados Situación 3 – Prueba 1
-----
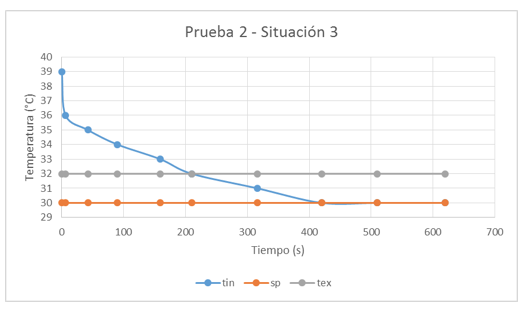
Tabla 7
Situación 3 - Prueba 2
tiempo(s) |
tin(°C) |
sp(°C) |
tex(°C) |
0 |
39 |
30 |
32 |
6 |
36 |
30 |
32 |
42 |
35 |
30 |
32 |
90 |
34 |
30 |
32 |
159 |
33 |
30 |
32 |
210 |
32 |
30 |
32 |
316 |
31 |
30 |
32 |
420 |
30 |
30 |
32 |
510 |
30 |
30 |
32 |
620 |
30 |
30 |
32 |
-----
Gráfica 6
Resultados Situación 3 - Prueba 2
-----
Tabla 8
Situación 3 - Prueba 3
tiempo(s) |
tin(°C) |
sp(°C) |
tex(°C) |
0 |
50 |
40 |
41 |
9 |
49 |
40 |
41 |
12 |
48 |
40 |
41 |
15 |
47 |
40 |
41 |
22 |
46 |
40 |
41 |
30 |
45 |
40 |
41 |
42 |
44 |
40 |
41 |
46 |
43 |
40 |
41 |
65 |
42 |
40 |
41 |
95 |
41 |
40 |
41 |
180 |
41 |
40 |
41 |
240 |
40 |
40 |
41 |
340 |
40 |
40 |
41 |
380 |
40 |
40 |
41 |
400 |
39 |
40 |
41 |
480 |
39 |
40 |
41 |
540 |
39 |
40 |
41 |
600 |
39 |
40 |
41 |
660 |
39 |
40 |
41 |
-----
Gráfica 7
Resultados Prueba 1 – Situación 3
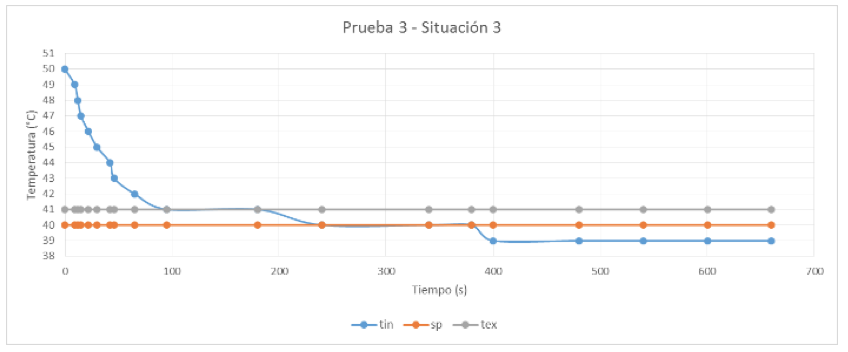
En la primera prueba, de la situación 3, el sistema piloto sólo disminuye la temperatura interna 1°C por debajo de la temperatura externa. En la segunda prueba, el sistema responde de forma similar a las situaciones anteriores (situación 1 y situación 2) siendo capaz de lograr el set-point del usuario. En la tercera prueba el sistema alcanzó el set-point del usuario; incluso disminuye más la temperatura interna, manteniendo la relación de 2°C por debajo de la temperatura externa.
Realizando pruebas de las máximas y mínimas temperaturas que se pueden alcanzar en la prueba piloto, se obtuvo que:
Máxima temperatura externa: 46°C, luego de 15min de encendida la fuente de calor en el sistema piloto.
Mínima temperatura externa: La mínima temperatura externa durante el experimento fue de 29°C en un recinto refrigerado y 32°C al aire libre.
Máxima temperatura interna: 58°C, luego de 15 min de encendida la fuente de calor.
Mínima temperatura interna: corresponde con la temperatura ambiente donde se realizaron las pruebas. La mínima temperatura durante el experimento fue de 29°C en un recinto refrigerado y 32°C al aire libre.
El set-point del usuario puede ser ajustado teniendo en cuenta la respuesta del sistema en las situaciones anteriores. Se observa que el sistema piloto es capaz de mantener un set-point de valores superiores o iguales a la temperatura externa. El mínimo valor de set-point que se puede lograr es uno con el valor de 2°C por debajo de la temperatura externa. Por consiguiente, la ecuación de define el set-point ideal del sistema es la siguiente:
spi=tex-2
Donde:
spi = set-point ideal.
tex = temperatura externa.
El controlador del sistema realiza la siguiente evaluación para decidir cuál set-point asignar (set-point del usuario – sp o set-point ideal – spi):
Si sp < spi entonces asigna a sp el valor de spi. Si esto no sucede mantiene el valor de sp.
El control implementado para mantener el set-point es un control On-Off sobre el sistema refrigerador. Al control se le da un valor de histéresis de ±2% para evitar que las fluctuaciones en las lecturas de los sensores hagan que cambie el estado On-Off de manera reiterada y proteger al sistema de posibles averías.. Las condiciones que definen el estado On-Off del extractor son:
El extractor estará encendido (On) si se cumple que tin>sp+(sp*0.02)
El extractor estará apagado (Off) si se cumple que tin>sp–(sp*0.02)
Donde:
sp = set-point ajustado
tin= temperatura interna.
A continuación se presenta el comportamiento del sistema con el control del set-point implementado.
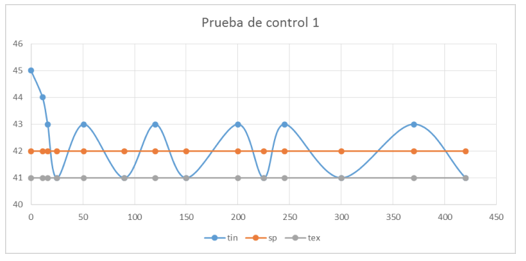
En primer caso, se eligió un set-point de 1°C por encima de la temperatura externa (42°C), y la figura 18 muestra la respuesta del sistema para esta prueba.
Gráfica 8
Respuesta sistema Prueba control 1
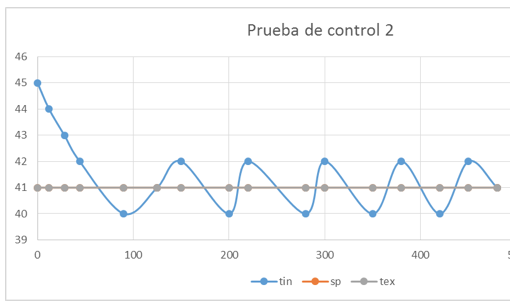
En el segundo caso de prueba, se eligió un set-point igual a la temperatura externa de 41°C. La figura 19 muestra la respuesta del sistema.
Gráfica 9
Respuesta sistema Prueba control 2
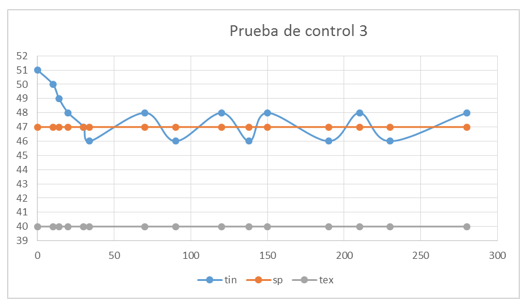
La tercera prueba con un set-point de 7°C por encima de la temperatura externa de 47°C. La siguiente figura 20 muestra la respuesta del sistema en esta situación.
Gráfica 10
Respuesta sistema Prueba control 3
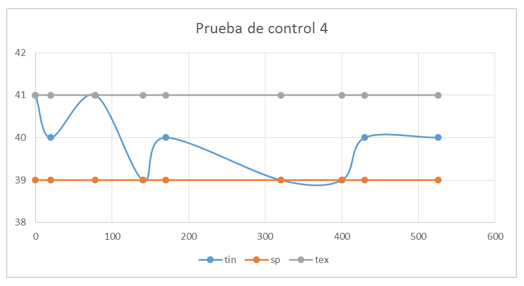
Finalmente, en la cuarta prueba se eligió un set-point de 35°C, el controlador detectó que el set-point elegido era demasiado bajo y por ende el sistema piloto no podría alcanzarlo. El controlador ajustó el set point. La siguiente figura muestra la respuesta del sistema.
Gráfica 11
Respuesta sistema Prueba control 4
Con los resultados obtenidos en las pruebas de control se corrobora que el sistema es capaz de mantener un set-point dado, oscilando entre ![]() . Así mismo el sistema ajusta el set-point del usuario si detecta que está por debajo del set point ideal, es decir, de la menor temperatura posible para el sistema en las circunstancias de temperatura externa existente.
. Así mismo el sistema ajusta el set-point del usuario si detecta que está por debajo del set point ideal, es decir, de la menor temperatura posible para el sistema en las circunstancias de temperatura externa existente.
Cuando la temperatura externa es menor al set-point el sistema responde eficazmente al control. En el caso contrario (Prueba 4) el sistema llega al set point, pero el ajuste realizado no es suficiente porque no logra apagarse el extractor; el sistema requiere de un mayor esfuerzo para mantener el set-point. Por ello, el set point ideal para el modelo a escala debe estar sólo 1°C por debajo de la temperatura externa, así:
spi=tex-1
El valor de histéresis se cambia a 1%. Con lo que se mejora el rango oscilatorio de la respuesta del sistema.
Se puede concluir que:
Se logró ajustar el set-point del usuario por un set-point ideal, en los casos en que el sistema no pueda alcanzar el primero.
El sistema tarda menos tiempo en restablecer y mantener un set-point de usuario cercano a la temperatura externa.
El mínimo valor de set-point que puede alcanzar el sistema piloto es el set-point ideal, este es 1°C menor a la temperatura externa. Usando la técnica de control On-Off es posible mantener el set-point establecido y así reducir el consumo de energía del sistema.
Como mejoras al prototipo se propone controlar automáticamente el calentamiento del recinto interior (encendido o apagado de la fuente de calor), lo que permitiría un comportamiento más uniforme en el tiempo. Además, se realiza la adaptación del piloto para un sistema acondicionador de aire real.
Afram, A., & Janabi-Sharifi, F. (2015). Gray-box modeling and validation of residential HVAC system for control system design. Applied Energy, 137, 134-150.
Aparicio-Ruiz, P., Valverde, J. R. F., & Giménez, L. O. (2010). Sistema experto basado en la lógica difusa para la detección de configuraciones climáticas asociadas al confort. Dirección y Organización, (42), 38-45.
Belic, F., Hocenski, Z., & Sliskovic, D. (2015). HVAC control methods-a review. En System Theory, Control and Computing (ICSTCC), 2015 19th International Conference on (pp. 679-686). IEEE.
Bernal, W. N., Caballero, G. C., Sánchez, J. O., & Paez-Logreira, H. (2016). Enterprise architecture framework oriented to cloud computing services. En Computers Communications and Control (ICCCC), 2016 6th International Conference on (pp. 64-69). IEEE.
Bravo-Montenegro, D., & López-Ortega, M. (2009). Diseño e Implementación de un Sistema de Refrigeración para Equipos de Laboratorio. Revista Colombiana de Física, 41(1).
Chinde, V., Kosaraju, K. C., Kelkar, A., Pasumarthy, R., Sarkar, S., & Singh, N. M. (2016). Building HVAC systems control using power shaping approach. En American Control Conference (ACC), 2016 (pp. 599-604). IEEE.
Gelvez-Arocha, O. A., Quiroga-Mendez, J. E., Barajas-Merchan, D. E., & Gomez-Sarmiento, M. L. (2013). Estudio Experimental de las Estrategias de Control On-Off y Control Continuo en un Sistema de Refrigeración. Revista UIS Ingenierías, 11(1).
Holub, O., Zamani, M., & Abate, A. (2016). Efficient HVAC controls: A symbolic approach. En Control Conference (ECC), 2016 European (pp. 1159-1164). IEEE.
Kravtcova, A. (2015). Development of cooling HVAC-type system based on thermoelectric effect.
Mata, A. J. M., Martínez, R. S., Camilo, J. A. S., Malvez, J. A., & Sánchez, R. O. (2012). Desarrollo de un equipo didáctico de bajo costo para el control de temperatura. RMDI, 1.
Papadopoulos, S., & Azar, E. (2016). Optimizing HVAC operation in commercial buildings: a genetic algorithm multi-objective optimization framework. En Proceedings of the 2016 Winter Simulation Conference (pp. 1725-1735). IEEE Press.
Satyavada, H., Babuška, R., & Baldi, S. (2016). Integrated dynamic modelling and multivariable control of HVAC components. En Control Conference (ECC), 2016 European (pp. 1171-1176). IEEE.
van der Klauw, T., Hoogsteen, G., Gerards, M. E., Hurink, J. L., Feng, X., & Hebner, R. E. (2016). Assessing the potential of residential HVAC systems for demand-side management. En Innovative Smart Grid Technologies Conference (ISGT), 2016 IEEE Power & Energy Society (pp. 1-5). IEEE.
1. Ingeniero Electrónico, Magister (c) en Ingeniería de Sistemas y Computación. Director de Investigaciones, Profesor del Programa de Ingeniería Electrónica. Corporación Politécnico de la Costa Atlántica. hpaezl@pca.edu.co
2. Ingeniero Electrónico, Magister (c) en Ingeniería. Profesor del Programa de Ingeniería Electrónica. Universidad de la Costa, CUC. eramirez1@cuc.edu.co
3. Ingeniero Electrónico. Programa de Ingeniería Electrónica. Universidad de la Costa, CUC. luis.950315@hotmail.com
4. Ingeniera Electrónica. Programa de Ingeniería Electrónica. Universidad de la Costa, CUC. sandramarcelal95@gmail.com
5. Ingeniero Electrónico. Programa de Ingeniería Electrónica. Universidad de la Costa, CUC. camiran94@gmail.com